Czy potrzebuję dodatkowych kabli Ethernet podczas korzystania z przełącznika Gigabit Ethernet
Streszczenie:
Gigabit Ethernet Switch to urządzenie sieciowe, które umożliwia połączenie wielu urządzeń w celu utworzenia sieci lokalnej (LAN). Korzystając z przełącznika Ethernet Gigabit, możesz się zastanawiać, czy potrzebujesz dodatkowych kabli Ethernet. Odpowiedź zależy od konkretnej konfiguracji i wymagań.
Kluczowe punkty:
1. Sprawdź stronę produktu wybranego PHY: Przed ustaleniem, czy potrzebujesz dodatkowych kabli Ethernet, ważne jest, aby sprawdzić stronę produktu wybranego PHY (warstwa fizyczna) w projekcie. Na przykład PHY KSZ9131 ma dwie opcje, KSZ9131MNX i KSZ9131RNX, z różnymi interfejsami.
2. Kompatybilność interfejsu: Jeśli wybrany Mac (Media Access Control) obsługuje tylko interfejs RGMII (zmniejszony niezależny interfejs mediów), wówczas KSZ9131MNX nie byłby kompatybilny. Konieczne jest wybranie odpowiedniego PHY, który pasuje do interfejsu Mac.
3. Strona MDI: Strona MDI (interfejs zależny od mediów), odnosząc się do połączenia między PHY i kablem, należy również wziąć pod uwagę przy wyborze prawidłowego PHY. Musisz wybrać między interfejsami kabli światłowodowych i miedzianych na podstawie twoich wymagań.
4. Auto MDI-X Funkcja: Większość nowoczesnych routerów, piast i przełączników obsługuje funkcję Auto MDI-X, która automatycznie przełącza się na odpowiednią konfigurację po podłączeniu kabla. To eliminuje potrzebę kabli crossover w celu komunikacji 1000base-t.
5. Kategorie kablowe: W przypadku połączeń Ethernet Gigabit powszechnie stosuje się kable CAT5E i CAT6. Te kable mogą obsługiwać wysokie prędkości danych wymagane dla Gigabit Ethernet Transmission.
6. Proste kable: W szczypt można użyć prostego kabla między systemami klienta a serwerem. Wszystkie urządzenia 1GIG i 10GIG automatycznie ustawią się na prawidłowe połączenia za pomocą kabli CAT5E i CAT6.
Pytania:
1. Co to jest Gigabit Ethernet Switch?
Gigabit Ethernet Switch to urządzenie sieciowe, które umożliwia łączenie wielu urządzeń, aby utworzyć LAN.
2. Skąd mam wiedzieć, czy potrzebuję dodatkowych kabli Ethernet podczas korzystania z przełącznika Gigabit Ethernet?
Potrzeba dodatkowych kabli Ethernet zależy od konkretnej konfiguracji i wymagań. Ważne jest, aby sprawdzić stronę produktu wybranego PHY i rozważyć kompatybilność interfejsu i stronę MDI.
3. Jaka jest różnica między KSZ9131MNX i KSZ9131RNX?
KSZ9131MNX i KSZ9131RNX to opcje pHys KSZ9131, każdy z różnymi interfejsami. Pierwszy wspiera GMII/MII, podczas gdy drugi obsługuje tylko RGMII.
4. Czy mogę użyć KSZ9131MNX, jeśli mój wybrany Mac ma tylko interfejs RGMII?
Nie, jeśli wybrany Mac obsługuje tylko interfejs RGMII, KSZ9131MNX nie byłby właściwym wyborem. Musisz wybrać prawidłowy PHY, który pasuje do interfejsu Mac.
5. Czy potrzebuję kabli crossover do komunikacji 1000base-t?
Nie, większość nowoczesnych routerów, piast i przełączników obsługuje funkcję Auto MDI-X, która eliminuje potrzebę kabli crossover w zakresie komunikacji 1000base-t.
6. Jakie kategorie kablowe są powszechnie używane do połączeń Gigabit Ethernet?
W przypadku połączeń Gigabit Ethernet, kable CAT5E i CAT6 są powszechnie stosowane, ponieważ mogą obsługiwać wysokie prędkości danych wymagane do transmisji Gigabit Ethernet.
7. Czego mogę użyć w szczypce, jeśli nie mam dodatkowych kabli Ethernet?
Jeśli nie masz dodatkowych kabli Ethernet, możesz użyć prostego kabla między klientami a systemami serwerów. Wszystkie urządzenia 1GIG i 10GIG automatycznie ustawią się na prawidłowe połączenia za pomocą kabli CAT5E i CAT6.
8. Jaka jest funkcja automatycznego mdi-x?
Funkcja Auto MDI-X jest obsługiwana przez większość nowoczesnych routerów, piast i przełączników. Umożliwia urządzeniom automatyczne przełączanie się do właściwej konfiguracji po podłączeniu kabla, eliminując potrzebę kabli crossover do komunikacji 1000base-t.
9. Czy mogę używać kabli światłowodowych zamiast miedzianych kabli do Gigabit Ethernet?
Tak, możesz wybrać między interfejsami kabli światłowodowych i miedzianych na podstawie twoich wymagań. Kable światłowodowe mogą osiągnąć przepustowość komunikacji ponad 10 gbit/s.
10. Jakie są teoretyczne maksymalne postacie dla przepustowości w Gigabit Ethernet?
Gigabit Ethernet może osiągnąć prędkości 1000 Mb / s (1 Gb / s). Jednak praktyczna przepustowość może być ograniczona czynnikami takimi jak prędkość kontrolera i/lub procesora, a także względy routingu PCB.
11. Czy powinienem rozważyć układ PCB i względy routingu dla Gigabit Ethernet?
Tak, rozważania układu PCB i routingu są ważne dla implementacji Gigabit Ethernet. Czynniki takie jak przesłuch, niedopasowanie impedancji i maksymalna długość śledzenia należy wziąć pod uwagę, aby zapewnić niezawodną wydajność.
12. Czy są jakieś zasoby do wdrożenia Gigabit Ethernet?
Możesz nazwać ten artykuł jako zasób wdrożenia Gigabit Ethernet. Dodatkowo na GitHub dostępne są przykładowe schematy do wdrożenia mikrochip KSZ9131RNX Gigabit Ethernet PHY.
13. Co jest PHY w kontekście Gigabit Ethernet?
PHY oznacza warstwę fizyczną i odnosi się do fizycznego interfejsu między transceiverem Ethernet a kablem. Jest odpowiedzialny za przesyłanie i odbieranie sygnałów danych.
14. Jakie są wyzwania w realizacji Gigabit Ethernet?
Niektóre wyzwania we wdrażaniu Gigabit Ethernet obejmują kontrolę impedancji, względy routingu PCB i zapewnienie kompatybilności między interfejsami PHY i MAC.
15. Jakie są zalety korzystania z przełącznika Gigabit Ethernet?
Gigabit Ethernet Switch umożliwia szybkie przesyłanie danych między wieloma urządzeniami w sieci. Może poprawić wydajność sieci, zmniejszyć zator sieć i zapewnić lepszą przydział przepustowości.
Czy potrzebuję dodatkowych kabli Ethernet podczas korzystania z przełącznika Gigabit Ethernet
Aby zademonstrować ten punkt, należy sprawdzić stronę produktu wybranego PHY w przykładzie projektowym, którym jest KSZ9131. Dostępne są dwie opcje, KSZ9131MNX i KSZ9131RNX. Podczas gdy pierwsza opcja obsługuje GMII/MII, drugi obsługuje tylko RGMII. Jeśli wybrany MAC ma tylko interfejs RGMII, wówczas KSZ9131MNX byłby niewłaściwym wyborem. Nie trzeba wspominać o stronie MDI, ponieważ jest to stosunkowo wyraźniejsze, jeśli chodzi o wybór prawidłowej pHY, z wyborem między interfejsami włókien i miedzianymi.
Czy Gigabit Ethernet potrzebuje przełącznika
Оjed
Ыы зарегистрир John. С помощю этой страницы ыы сожем оRipееделить, что запросы оRтравляете имено ыы, а не роvert. Почем это могло пRроизойиS?
Эта страница отображается тех слччаях, когда автоматическими системамgz которые наршают усовия исполззования. Страница перестанеura. До этого момента для исползования слжжж Google неоtoś.
Источником запросов может слжить ведоносное по, подкbarów. ыылку заRzy. Еarag ы исползеете общий доступ и интернет, проблема может ыть с компюююеyn с таким жж жж жесом, кк у комszczeюююе000. Обратитеunks к соем системном адинистратору. Подроlit.
Проверка по слову может также появаятьenia, еaсли ы водите сложные ззапры, оind обычно enia оиизи инenia оtoś еами, или же водите заlektora.
Czy potrzebuję dodatkowych kabli Ethernet podczas korzystania z przełącznika Gigabit Ethernet
Mam przełącznik NetGear Ethernet GS105, ale nie’T myślę, że mogę to jeszcze poprawnie podłączyć.
Wygląda na to, że będę potrzebować dwóch dodatkowych kabli Ethernet, jednego od mojego routera do przełącznika, a następnie drugiego z przełącznika Gigabit na komputer serwerowy lub Mac,
Nie jestem pewien, która kategoria kablowa, którą powinienem mieć do tego lub czy powinien to być specjalny kabel.
Это хороший воubli?
Пролосоras отенить
1 коментарий
„Nowsze routery, piasty i przełączniki (w tym około 10/100, i Wszystkie 1 gigabit lub 10 urządzeń gigabitowych w praktyce) Użyj automatycznego MDI-X dla połączeń 10/100 Mbit, aby automatycznie przełączyć się do właściwej konfiguracji po podłączeniu kabla.”
„Gigabit i szybsze łącza Ethernet nad skręconą parą Kabel używają wszystkich czterech pary kablowych do jednoczesnej transmisji w obu kierunkach. Z tego powodu nie ma dedykowanych pary transmisji i odbierania, a zatem kable crossover nigdy nie są wymagane do komunikacji 1000base-T ”
Jeśli potrzebujesz, aby sprawić, że wszystko będzie w szczycie, możesz użyć prostego kabla między klientem a systemami serwerów! Wszystkie urządzenia 1GIG i 10GIG zostaną automatycznie ustawione na prawidłowe połączenia za pomocą kabli CAT5E i 6.
Gigabit Ethernet 101: Podstawy do wdrożenia
Podczas fazy planowania na poziomie systemu dowolnego dużego projektu sprzętowego, co najmniej jeden łącze komunikacyjne Ethernet jest często zawierane jako opcja standardowa, a to ten interfejs Ethernet na tablicy obwodów omówimy dogłębnie. W mojej społeczności Altium pojawia się pytanie, jak wdrożyć Ethernet co kilka miesięcy. Często spotyka się z pewnymi ogólnymi odpowiedziami na temat impedancji, ale bez fantastycznego zasobu, z którym mogą się połączyć, co obejmuje wszystko od podstaw. Ten przewodnik jest tym, czego szukasz, jeśli ty’gotowy do dodania Ethernet, zwłaszcza Gigabit Ethernet, do konstrukcji obwodu elektronicznego i potrzebuj prędkości na Ethernet.
Zanim zanurzymy się, to nie’t Artykuł projektu – wygraliśmy’Nie buduj pełnego rozwiązania w tym projekcie. Wiem jednak, że wszyscy uwielbiają uzyskać schemat, a nie tylko czytać strony informacji technicznej, więc dodałem przykładowy schemat GitHub z wdrożeniem mikrochip KSZ9131RNX Gigabit Ethernet Transceiver PHY PHY. My’Wiem, czym jest później, wiem, że może to ułatwić niektórym czytelnikom zrozumieć, czy mają schemat, na który należy patrzeć, i zastosować artykuł. W tym artykule są zrzuty ekranu tych schematów. Są jednak o wiele łatwiejsze do wyświetlenia w Altium Designer® niż obrazy na blogu.
Protokół Ethernet standaryzowano w latach 80. i szybko ewoluował z prędkości od 10 m do 10 g+ bitów/s. Z dzisiaj’Technologia S, Fast Ethernet (100base-TX) i Gigabit Ethernet (1000base-T) są rozsądnie standardowe, jeśli drut obwodu miedzianego (skręcony) jest używany jako fizyczny ośrodek transmisyjny. Z drugiej strony, jeśli preferowane są kable światłowodowe, można osiągnąć przepustowość komunikacji więcej niż 10 gbit/s. Należy zauważyć, że te szybkości transmisji są teoretycznymi maksymalnymi liczbami. Zawsze będą wąskie gardła, które ograniczają praktyczną przepustowość, takie jak prędkość kontrolera i/lub procesora, a także negatywne uderzenia spowodowane nieprecyzyjnym routingiem PCB (w tym przesłuchem, niedopasowaniem impedancji, maksymalna długość śladu). My’LL wejdzie do układu PCB i względy routingu pod koniec artykułu, gdy zrozumiemy, jak działa Gigabit Ethernet i wymagane komponenty obwodu.
Być może masz już pojęcie o wdrożeniu Gigabit Ethernet, być może nawet udało ci się wdrożyć działający interfejs Gigabit Ethernet, lub może to być pierwszy raz, kiedy zanotowałeś w szybkim projektowaniu interfejsu cyfrowego. Ten artykuł jest przeznaczony jako przewodnik dla projektantów, od podstaw teoretycznych po praktyczne aspekty projektowania schematu i układu. Nawet jeśli jesteś ekspertem w zakresie interfejsów cyfrowych, ten artykuł może być przydatny jako lista kontrolna lub przypomnienie teorii. Powinieneś pamiętać, że aby pomóc w czytelności tego artykułu, niektóre bloki lub komponenty nie zostaną opisane w niektórych sekcjach, ale luki te zostaną wypełnione w niektórych z poniższych sekcji.
Gigabit Ethernet Podstawy
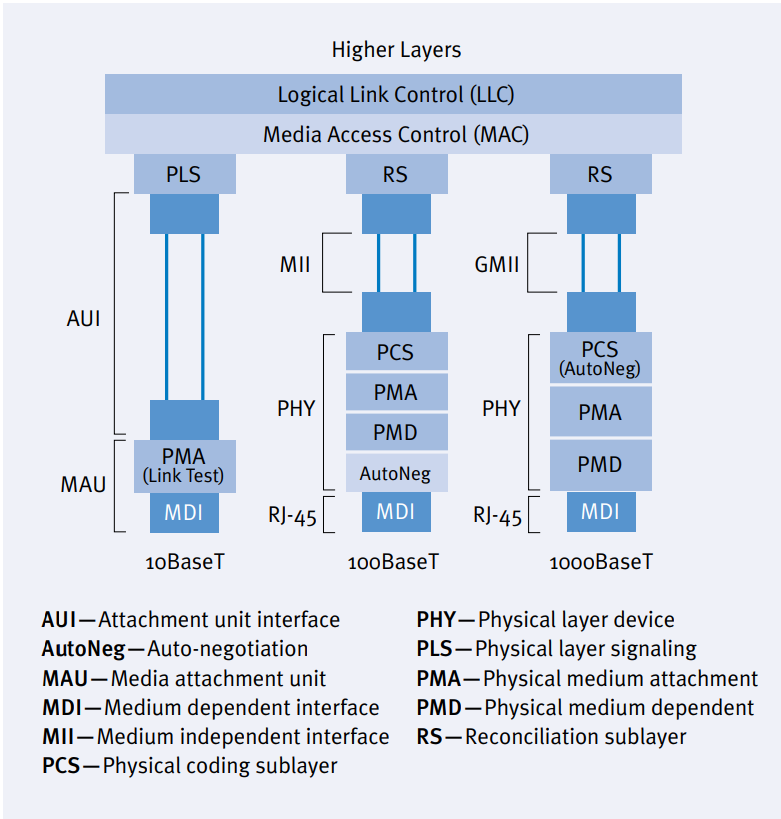
Przed wskoczeniem prosto do projektu sprzętowego pomocne może być krótkie wgląd w to, jakie rodzaje danych podróżują ze świata rzeczywistego do kontrolera z perspektywy sieci. Ogólny 7-warstwowy model OSI jest powszechnie używany do wyznaczenia struktury ramek wszystkich protokołów komunikacyjnych i Ethernet, zgodnie z definicją IEEE802.3 Standard, łączy niektóre warstwy modelu OSI w zaledwie cztery warstwy, jak można zobaczyć na rycinie 1.
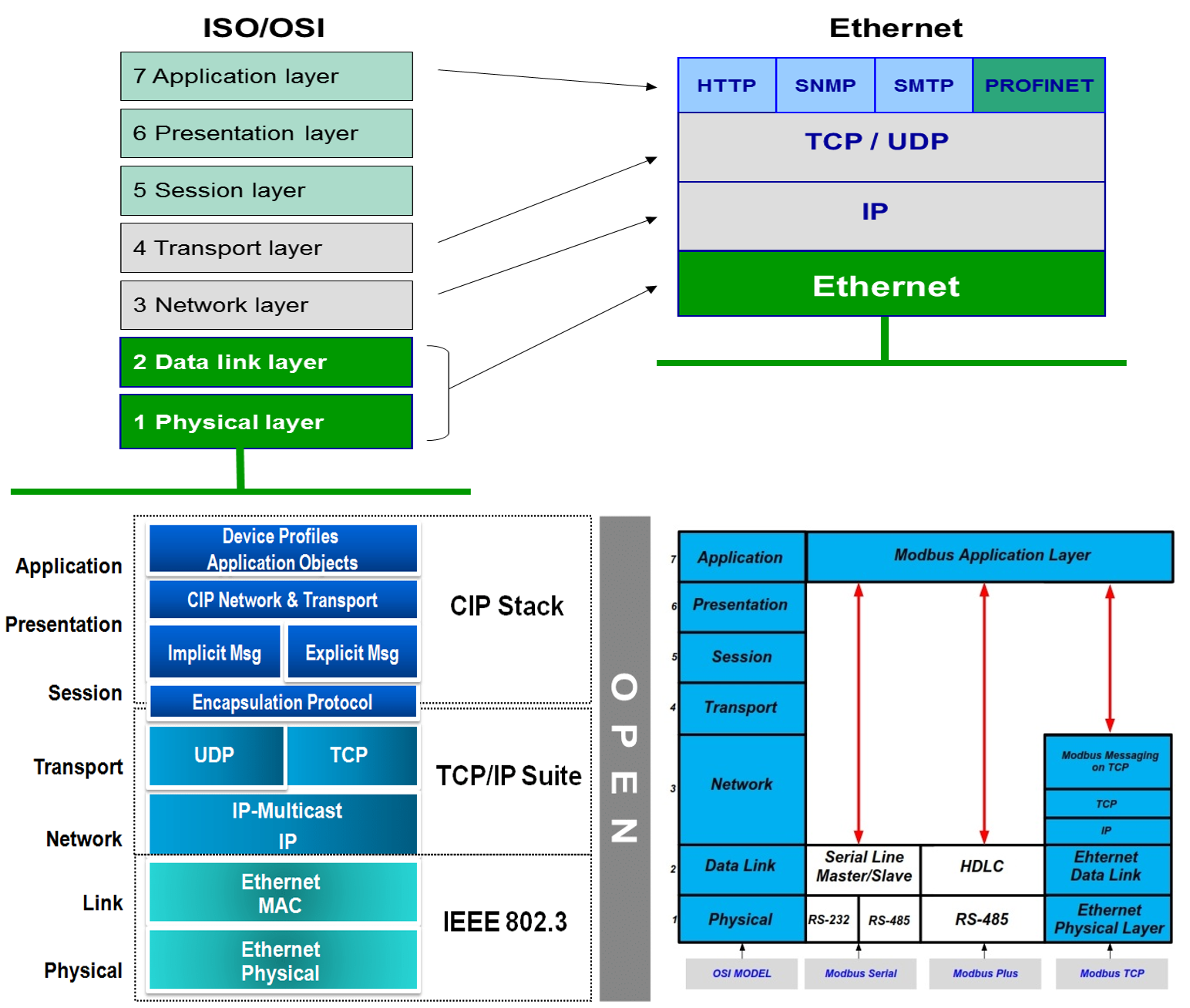
Projektanci sprzętu’ Obszary zainteresowania to “Warstwa fizyczna” (Ethernet PHY) i “Warstwa łącza danych,” podczas gdy inne warstwy są przede wszystkim zainteresowane programistami oprogramowania, biblioteki stosów sieciowych i programistów aplikacji, a także ekspertów ds. Bezpieczeństwa cybernetycznego. Z definicji dane Ethernetowe przenoszone na skręconym obwodzie miedzianym Ethernet Impedancja kabla Ethernet jest częścią warstwy fizycznej, dopóki nie dotrze do urządzenia. W warstwie łącza danych dane rozkładają się na format, który można zrozumieć za pomocą stosu sieciowego osadzonego w kontrolerze. Mówiąc prosto, warstwa fizyczna jest analogiczna do dróg i ciężarówek, które przewożą pocztę. Natomiast warstwa łącza danych odpowiada kopercie, która zawiera informacje o adresie potrzebnym do odróżnienia każdego elementu poczty od innej. Przejdziemy do bardziej szczegółowego wyjaśnienia, w jaki sposób te warstwy sieciowe odpowiadają równoważnym informacjom na poziomie IC w artykule.
Dlaczego warto wybrać Gigabit Ethernet?
Po zbadaniu historii ewolucji protokołu Ethernet, znacząca poprawa prędkości, która pojawia się z każdym nowym pokoleniem. Patrząc na szybkość sprzętu i możliwości przepustowości, wyraźnym wyborem generacji do wdrożenia w nowoczesnym projekcie jest Gigabit Ethernet. Jeśli chodzi o różne media, powiedzmy, że wybierasz Wi -Fi, aby uniknąć potrzeby kabli Ethernet, zdecydowanie istnieje pewne zalety i wady w porównaniu z Ethernetem, co można zobaczyć w poniższych przykładach.
- Prędkość: Maksymalna prędkość teoretyczna Wi -Fi działającego do IEEE 802.Standard 11 g wynosi 54 Mb / s, co najwyraźniej nie jest porównywalne z prędkością Ethernet 100 Mbps lub Gigabit Ethernet. Jednak Wi -Fi działający na IEEE 802.11AC Standard oferuje teoretyczne prędkości do 3.2 Gb / s, który jest trzy razy szybszy niż Gigabit Ethernet. Należy zauważyć, że adaptery Wi -Fi i punkty dostępu muszą być kompatybilne z 802.11AC w celu uzyskania tego rodzaju prędkości transmisji. Teoretyczna prędkość łącza Wi -Fi często nie jest możliwa w prawdziwym świecie, ponieważ rzadko mamy idealną linię wzroku między urządzeniami.
- Niezawodność: Połączenia przewodowe mogą być kierowane jako rodzaj sieci punkt-punkt, a dopóki nie występują przerwy kablowe lub błędy gniazda, nie są prawdopodobne przerw w ruchu sieciowym. To sprawia, że przewodowa operacja sieciowa jest bardzo spójna pod względem prędkości i opóźnień. Z drugiej strony WiFi jest podatne na zakłócenia innych urządzeń bezprzewodowych, a także degradację sygnałów z powodu warunków atmosferycznych i skutków przeszkód, takich jak ściany budowlane. Prosta zmiana wilgotności może znacznie wpłynąć na prędkość, ponieważ sygnał bezprzewodowy jest osłabiany przez wilgoć atmosferyczną. Na teoretyczne i praktyczne różnice prędkości wpływają również niezawodność, która jest znacznie bardziej widoczna podczas korzystania z Wi -Fi.
- Bezpieczeństwo: WiFi przesyła ruch w powietrzu, co oznacza, że odbiornik w zakresie może łatwo przechwytywać działania sieci. Twój ruch może być bezpieczniejszy podczas korzystania z połączeń przewodowych, w których niewykryte przechwycenie jest trudniejsze.
- Łatwość użycia: Jeśli nie lubisz ograniczać się do korzystania z kabli lub działają w miejscu, w którym układanie kabli jest problemem, wybór Wi -Fi może bardziej swobodnie udostępniać łączność sieciową.
Z wyjątkiem projektowania urządzeń IoT, projektant sprzętu często używa interfejsu Ethernet do komunikacji z innymi systemami, szczególnie do przesyłania danych i plików monitorowania nieporęcznych. Niezawodność i szybkość Ethernet są trudne do dopasowania, a ta niezawodność i szybkość upraszczają decyzje inżynieryjne oraz opracowanie sprzętu i oprogramowania układowego układu układowego. Korzystanie z połączenia przewodowego oferuje również kolejną przewagę: Koszty certyfikacji mogą być znacznie niższe, jeśli nie ma transmisji radiowej z urządzenia, ponieważ urządzenie będzie certyfikowane jako niezamierzony chłodnicy.
A co z korzystaniem z interfejsu USB zamiast połączenia Ethernet? Oboje używają połączeń przewodowych, a z niedawną ewolucją technologii USB, USB 3. x Standardowe interfejsy mają oceny prędkości, które są podobne lub wyższe niż Gigabit Ethernet (USB 3.1: ~ 10 Gbps). Czy powinniśmy wymienić cały sprzęt Ethernet USB 3. X W takim razie? Przed dokonaniem wyboru pomyśl o tym, czy chętnie zadowolisz się następującymi:
- Krótsze długości kabli (kilka metrów zamiast ~ 100 metrów dla Ethernet)
- Połączenie punkt-punkt zamiast połączenia wielopunktowego
- USB robi’t Oferuj typową sieć, więc popychanie danych do zdalnego serwera sieci/bazy danych/plików jest wyzwaniem.
Jeśli możesz żyć z tymi ograniczeniami, to dlaczego nie podać USB3.x próba zamiast Ethernet? Zauważ, że ograniczenia te nie mają na celu oczerniania USB3.Technologia X; Niezależnie od tego, czy wybierzesz USB, czy Ethernet, zależy od tego, czego potrzebujesz do konkretnych wymagań dotyczących aplikacji.
W przypadku Ethernet zmieniaczem gry jest użycie optycznego łącza komunikacyjnego zamiast kabla miedzianego, opcja, która rozszerza prawie całą prędkość, opóźnienie i długość kabla. .
Ethernet to bardzo wygodna technologia, umożliwiająca bezpośredni dostęp do standardowych protokołów i systemów sieciowych. Jeśli sieć jest dołączona, umożliwia dostęp do Internetu, przesuwanie danych do zdalnych serwerów, takich jak dostawcy chmury, jest stosunkowo trywialną implementacją, jeśli chodzi o tworzenie oprogramowania/oprogramowania układowego. Ethernet umożliwia wykorzystanie istniejącej infrastruktury. WiFi oferuje wiele udogodnień, ale wiąże się z ryzykiem i karami, które mogą być przyjęte w aplikacji. USB to płodny standard dostępny na wielu urządzeniach. Jednak twoje urządzenie musi znajdować się w pobliżu hosta lub urządzenia klienckiego, które zwykle wymaga niestandardowego oprogramowania zainstalowanego na tym urządzeniu, aby zapewnić komunikację z opracowanym produktem. Ethernet nie zawsze jest właściwą odpowiedzią na problem, ale’jest często dobrą odpowiedzią.
Nurkowanie w złączu RJ-45

Od niepamiętnych czasów, do interfejsów Ethernet zastosowano gniazda i wtyczki typu RJ-45 z skręconymi kablami miedzianymi. Najczęstszą konstrukcją kablową jest “Niezarodowa skręcona para (UTP),” który jest podzielony na kategorie według maksymalnej częstotliwości nośnej z kategorii 1 (CAT1) do kategorii 8 (CAT8). Częstotliwość nośnika określa prędkość transmisji i aby uzyskać prawidłowe prędkości, kabel oceniony jako CAT5 lub wyższy powinien być zawsze używany w Gigabit Ethernet.
Wskazówka: Zwróć uwagę na wybór gniazda RJ-45 na płytkę drukowaną, ponieważ niektóre gniazda mają opcję niskoprofilową, która będzie wymagała wycięcia płyty pod złączem. Należy również zauważyć, że niektóre gniazda RJ-45 zawierają wymagany obwód terminacyjny Ethernet Magnetics (znany jako zakończenie Bob Smith) zintegrowane z złączem (czasem nazywanym złączami Magjack).
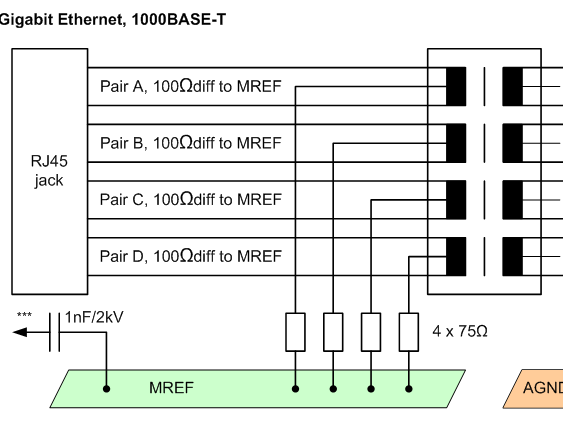
Jak widać na ryc. 2, kable UTP mają cztery skręcone pary, w których każdą parę przypisuje się jeden dodatni i jeden sygnał ujemny. Podczas gdy Ethernet 10/100 Mbps używa tylko dwóch par, Gigabit Ethernet używa wszystkich czterech par do komunikacji pełnej dupleksu i różni się od szybkiego Ethernet, ponieważ wszystkie cztery pary używane przez Gigabit Ethernet są dwukierunkowe. W tym momencie prawdopodobnie pojawiły się na myśl dwa pytania: dlaczego używają skręconych par i dlaczego jest jeden dodatni i jeden sygnał ujemny dla każdej pary?
Krótka odpowiedź brzmi, że obie te cechy są używane w celu zmniejszenia efektów promieniowania i zakłóceń elektromagnetycznych. Kable równoległe w pakiecie (nie skręcone) mogą łatwo wtryskiwać do siebie szum, ponieważ kabel działa jak induktor notowania prądu i tworzy pole magnetyczne. Technika różnicowa transmisji jest doskonałym punktem wyjścia w zapobieganiu temu efektowi pola magnetycznego, ponieważ ta metoda wykorzystuje dwa kable, jeden dla oryginalnego sygnału i jednej dla odwróconej kopii sygnału, w którym każdy indukuje równe i przeciwne pole magnetyczne, które anuluje drugie.
Chociaż odbiorniki różnicowe są odporne na szum w trybie wspólnym według projektu, jeśli dodatnie i ujemne kable sygnałowe nie są równie dystansowane od źródła szumu, szum w trybie wspólnym można przekształcić w szum trybu różnicowego. Ten problem jest rozwiązany przez przekręcenie pary sygnałów dodatnich i ujemnych. To zapewnia, że są blisko siebie na całej długości kabla. Odmiana tej techniki, routing par par, jest szeroko rozpowszechnioną techniką stosowaną w układzie PCB dla krytycznych sygnałów.
Innym problemem widocznym w komunikacji szybkiej jest odbicie sygnału. Jeśli istnieją jakieś niedopasowania impedancji wzdłuż ścieżki sygnału, maksymalna moc nie zostanie przeniesiona poza ten punkt, a część energii sygnału zostanie odbita z powrotem do źródła. Jeśli impedancja dłuższych kabli i/lub śladów PCB nie jest dobrze dopasowana, jakość sygnału może zostać zdegradowana do punktu, w którym powoduje awarię komunikacji.
Podsumowując, kabel UTP ma cztery zrównoważone skręcone pary, które mają 100 omówek o charakterystyce 100 omów w celu zmniejszenia odbicia, i są skręcone przy różnych współczynnikach zakrętu w celu zmniejszenia przesłuchu między parami. Przemysł stara się z produkcją kablów, a ten artykuł poprowadzi Cię przez sposób uzyskania najlepszego układu PCB, aby uniknąć efektów ubocznych szumu lub strat.
Interpretacja sygnałów Ethernet w PCB
Nawet gdy mówimy o szybkich interfejsach cyfrowych, nie byłoby nieprawidłowe stwierdzenie, że świat jest “analog” środowisko. Wszystkie informacje przemieszczające się wzdłuż kabla muszą być odpowiednio zdigitalizowane zgodnie z wymaganym protokołem kontrolera, niezależnie od jego architektury. Pamiętając model OSI i warstwy protokołu Ethernet, pierwszy to “Warstwa fizyczna” (PHY), który rozpoczyna się od kabla i trwa, aż modulowany sygnał rzeczywistego nie zostanie odebrany/przesyłany przez urządzenie PHY IC. PHY IC jest nadajnikiem interfejsu Ethernet, który obsługuje operacje kodowania/dekodowania zgodnie z protokołem i zawiera “Interfejs średnio zależny (MDI)” dla podłączonego medium transmisyjnego (i.., Kabel UTP w przypadku Gigabit Ethernet).
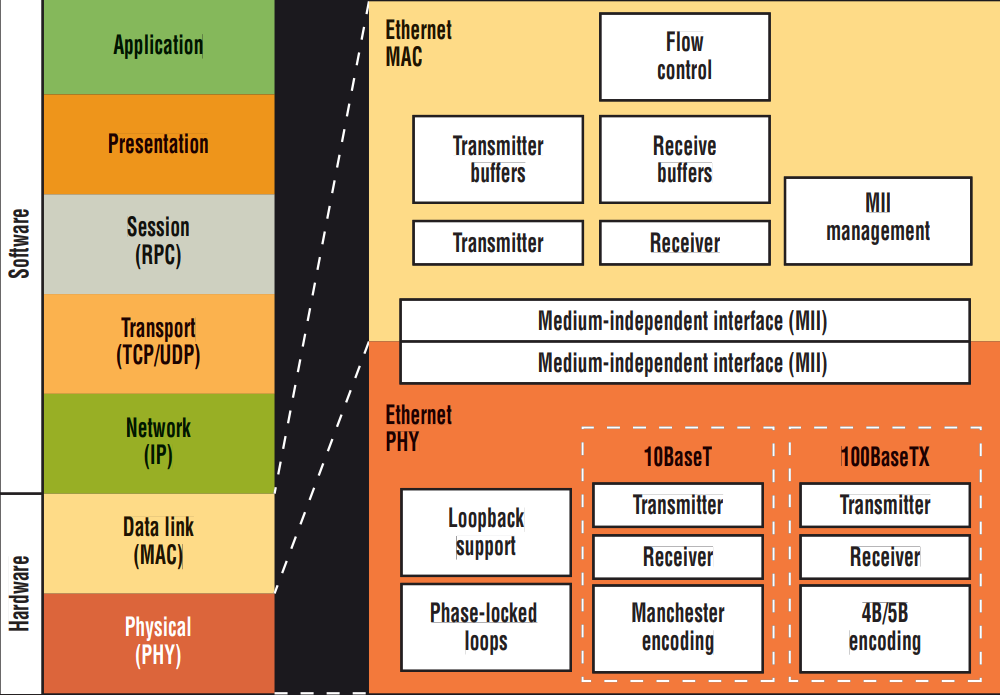
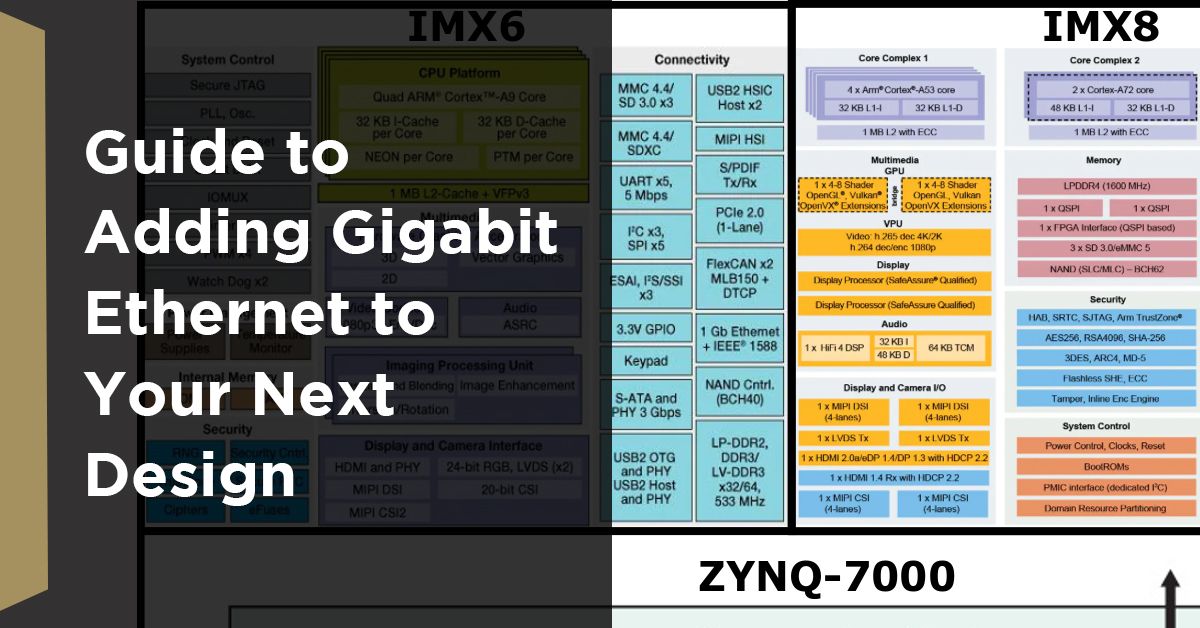
Druga warstwa to “Warstwa łącza danych,” który jest zaimplementowany w Media Access Controller (MAC), który jest kontrolerem pośrednie. Po zakończeniu pracy PHY z bitami sygnałowymi, wysyła je bezpośrednio przez “Interfejs średnio niezależny (MII)” do kontrolera MAC, który tworzy i zatwierdza strukturę ramki zgodnie z zdefiniowanym protokołem. PHY używa MDI do połączenia RJ-45. MII służy do interfejsu między PHY i Mac.
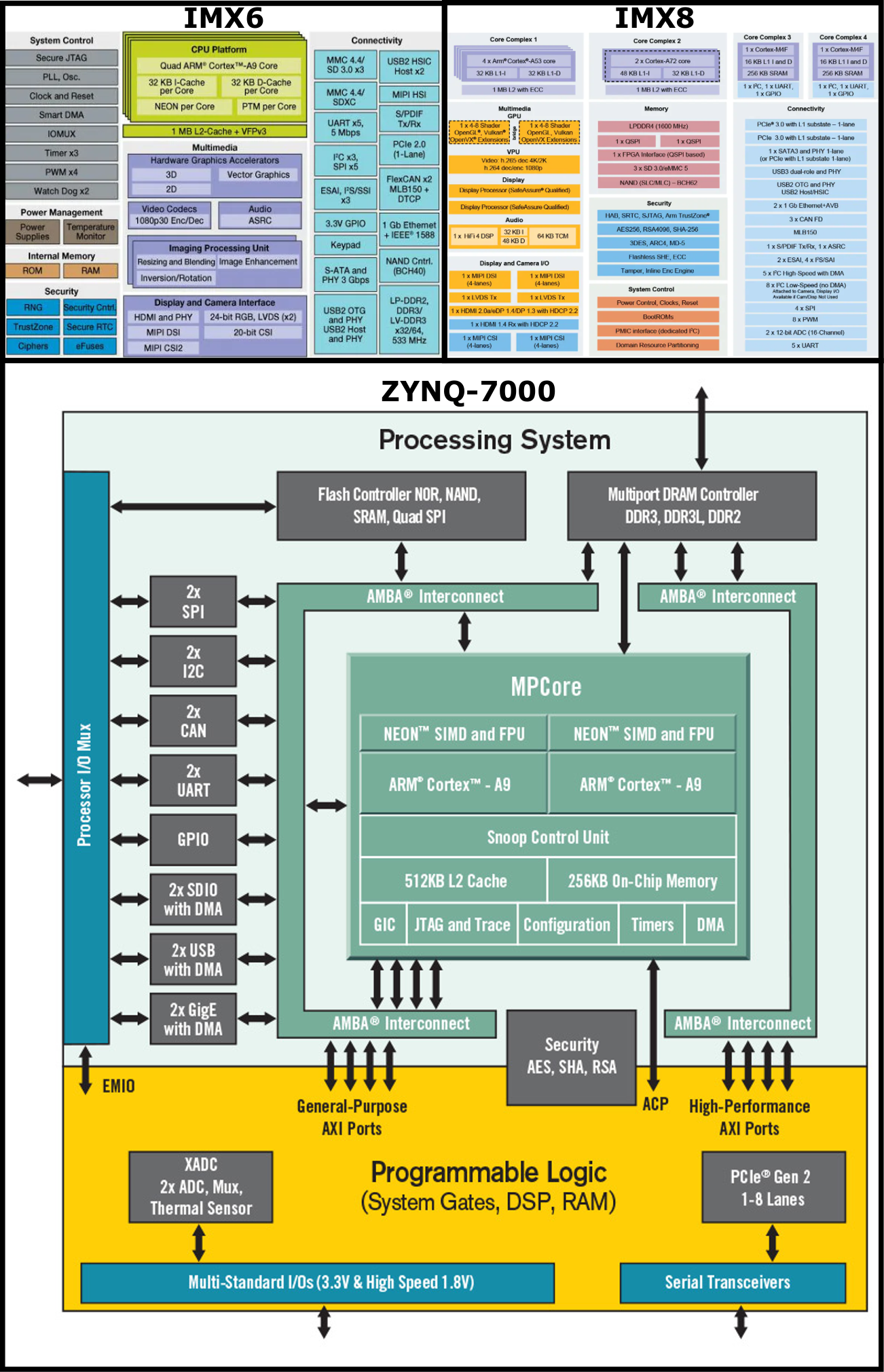
RJ-45 RJ-45 RJ-45 Ponieważ przepustowość danych dla wymagań dotyczących Gigabit (1/10+Gbps), interfejsy Ethernet są tak wysokie, magistra.X lub 16-/32-bitowa jest wymagana dla jednostek przetwarzania, które nie mają zintegrowanego Maca. Większość wysokiej klasy mikroprocesorów i systemów systemowych (SOC) (na przykład NXP I.MX6 i I.MX8, XILINX ZYNQ-7000 SOC, TI SITARA) mają zintegrowany kontroler MAC Gigabit do obsługi przesyłania danych o wysokiej przepustowości do stosu sieciowego. W przeciwieństwie do tego, niektóre MCU na średnim poziomie (na przykład STM32F4 i wiele innych serii Cortex Series lub Microchip PIC32M) mają wbudowany Ethernet Mac 10/100 Mbps. Chociaż wspomnieliśmy o trzeciej opcji, nie jest łatwo znaleźć kombinację Gigabit PHY i MAC. Dlatego właśnie zawarliśmy tę opcję dla kompletności; Na przykład Microchip LAN7430 i LAN7850 są dostępne na rynku. Ponadto seria Intel 825XX to kolejna opcja, ale ogólne dostawcy ich nie zapasują, a dostępność podlega wielkościom minimalnym zamówienia (MOQ) i umowom o nieujawnianiu informacji (NDA). Z drugiej strony, dla opcji 10/100 Mb/s, wiele z tych urządzeń można znaleźć w płytkach elektronicznych na poziomie hobby, takich jak Bus ENJ2860, ENC424J600 i W5100/W5500 z interfejsami dla szeregowego interfejsu peryferyjnego (SPI). Ogólnie rzecz biorąc, druga wymieniona opcja jest zawsze preferowana, jeśli jednostka przetwarzania ma wystarczający interfejs MAC (MII) dla wymaganej ilości interfejsu Gigabit dla projektu. Nawet przy ograniczonej liczbie interfejsów Mac po stronie procesora, użycie przełączników Ethernet na poziomie IC może rozwiązać wszelkie problemy, jeśli wszystkie interfejsy Ethernet działają na tym samym poziomie poufności sieci. Wykorzystanie przez przemysł obrony może wymagać fizycznego oddzielenia interfejsów ze względów bezpieczeństwa. W oparciu o informacje, które dotychczas omówiliśmy, wybraliśmy przykład projektowy, który będzie oparty na użyciu dyskretnego PHY i zintegrowanego komputera Mac. Przed pójściem dalej, niech’s, na które dostawcy ogólnie magazynują popularne dyskretne gigabit PHY i MAC ICS. Należy zauważyć, że konkretne kryteria wyboru i rozważenie ich funkcji zostaną omówione w poniższych sekcjach. Odpowiednie urządzenia to KSZ9031, KSZ9131, VSC8211 i VSC8501 (wszystkie z Microchip/Microsemi), ADIN1300 (urządzenia analogowe), MAX3956 (maksyma) i DP83867 (Texas), które są powszechnie zaopatrzone w gigabit pHIP Gigabit PHY ChIPS. Broadcom to kolejny producent Gigabit PHY (seria BCM546X i BCM548X), ale na ogół są nieopisane z wysokim MOQ i/lub mają długi czas realizacji. LAN7431 i LAN7801 (Microchip), BCM5727 i BCM5720 (Broadcom) to wszystkie kontrolery Gigabit Mac, które można znaleźć na rynku dostępne na rynku. Wskazówka: Zwróć uwagę na wymagania środowiskowe zintegrowanych obwodów podczas dokonywania wyboru. Dokładnie sprawdź swoje potrzeby pod względem temperatury roboczej, zgodności ROHS i wrażliwości na wilgoć oprócz wymagań elektrycznych, takich jak poziom napięcia Ethernet, ślad urządzenia itp.Magnetyki
- Nie ma potrzeby zasilania napięcia po izolowanej stronie, ponieważ sygnał jest bezpośrednio przenoszony przez transformator.
- Sygnały Ethernet (nawet 10 Mb / s) są zbyt szybkie dla większości optoisolatorów, a transformatory są tańsze i łatwiejsze do uzyskania.
- Z samej natury transformatory mają bardzo wysoki współczynnik odrzucenia w trybie wspólnym (CMRR), co czyni je idealnie dopasowanym do różnicowej komunikacji. Wszelkie napięcie w trybie wspólnym przyłożone do obu zacisków transformatora jest odrzucane, a tylko różnicowe napięcie między zaciskami jest przenoszone na odizolowaną stronę.
- Ponieważ pary MDI są kontrolowanymi przez impedancję zrównoważonymi parami różnicowymi (Z0 = 100 Ω), należy je ściśle dopasować do impedancji charakterystycznej kabla skręconego pary. Załóżmy, że pary kablowe mają inną impedancję od par MDI. W takim przypadku transformator oferuje idealny punkt do przezwyciężenia wszelkich niedopasowania impedancji, umożliwiając przeniesienie sygnału bez żadnych refleksji z powodu dopasowanych impedancji. Ponadto, jak omówimy w poniższych sekcjach, niektóre urządzenia PHY Triseiver mogą być oparte na niezrównoważonych parach MDI, a transformatory są idealne do użytku jako Balun (zrównoważony na nierównomierny) konwertor.
- Ochrona napięcia o wysokiej izolacji (standard wymaga odporności do 1500 VAC przy 50/60 Hz przez 60 sekund między parami lub od jednej pary do podwozia) można uzyskać przy stosowaniu izolacji magnetycznej, która chroni stronę PHY przed skutkami strajków ESD.
Kilka wad stosowania transformatora to to, że blokuje komponent DC i nie jest bardzo wydajny na niskich częstotliwościach. Można to jednak łatwo rozwiązać przez schemat modulacji i wybór odpowiedniego transformatora, który spełnia wybrane standardowe definicje protokołu Ethernet.
Po podjęciu decyzji o zastosowaniu opcji transformatora i po krótkim wyszukiwaniu dostawcy, pierwszym pytaniem, które najprawdopodobniej masz, jest to, czy powinieneś używać dyskretnych magnetycznych, czy złącza ze zintegrowanym magnetykiem Ethernet. Niestety nie ma idealnej odpowiedzi, a kompromis między tymi opcjami musi zostać szczegółowo przeanalizowany przez projektanta. Porównanie dwóch opcji podsumowano w tabeli 1 poniżej (odważny tekst oznacza zwycięzcę).
Tabela 1. Kompromis między dyskretnymi i zintegrowanymi magnetykami
| Dyskretne magnetyki | Zintegrowane magnetyki z RJ-45 | |
|---|---|---|
| Koszt | Droższe z powodu używania większej liczby komponentów. | Tańsze, ponieważ liczba elementów BOM jest niższa. |
| Montaż | Bardziej złożone z bardziej lutowymi częściami. | Montaż jest tylko złączem, a następnie jest gotowy do użycia. |
| Układ | Bardziej złożony, słaby układ może negować zalety elektryczne stosowania dyskretnych magnetycznych. | Bardziej proste i przy mniejszym ryzyku błędu układu. |
| Konserwacja | Niepowodzenie części mogą być rozwiązywane i wymienione osobno. | W przypadku awarii całe złącze należy wymienić, aby utrzymać się w perspektywie długoterminowej. |
| Crosstalk/EMC i ESD | Za pomocą dobrego układu możliwość przesłuchu między parami zmniejsza. Gdy magnetyki tworzą izolowaną domenę, strajki ESD są obsługiwane w ograniczonym obszarze PCB przed dotarciem do strony PHY. | Chociaż ekranowanie metalowego łącznika zapewnia pewne zalety EMC, jest bardziej podatne na przesłuch między parami, a skok napięcia z uderzenia ESD może być łatwiej sprzężony z parami MDI, ponieważ transformator znajduje się w małym obszarze. |
| Kompatybilność PHY | Kompatybilny ze wszystkimi fizycznymi ze względu na osobne połączenia do pinów. | . |
W świetle dostarczonych informacji, to’do projektanta, aby wybrać najlepsze dopasowanie do ich konkretnej aplikacji. Aby zauważyć, że na podstawie naszego doświadczenia, jeśli istnieje jakikolwiek sposób niezawodności i/lub bezpieczeństwa (takie jak MTBF, FME (C) Wymagania w branży motoryzacyjnej i obronnej), wówczas korzystanie z dyskretnej magnetyki jest zwykle lepszym wyborem. W przypadku masowych projektów komercyjnych i elektroniki na poziomie hobby zintegrowane magnetyki są idealne dopasowanie, ponieważ obniżają koszty i upraszczają proces projektowania. Tutaj zostanie wybrana opcja dyskretnej magnetyki dla naszego przykładu projektowania. Struktura wewnętrzna, kryteria wyboru i diagramy połączenia dla dyskretnych magnetycznych zostaną opisane poniżej.
Po pierwsze, wybrane magnetyki powinny mieć blok transformatora dla każdej z czterech par używanych w aplikacjach Gigabit Ethernet. Ponadto, mimo że nie jest to obowiązkowe, posiadanie dławika w trybie wspólnym (CMC) w celu zwiększenia odporności na szum w trybie wspólnym jest zawsze dobrą opcją. Chociaż same odbiorniki różnicowe są dobre w odrzucaniu szumu w trybie wspólnym (CM), za pomocą CMC, stosunek sygnału do szumu, aw rezultacie wskaźnik błędu bitu zostanie ulepszony po stronie odbiornika. . Innym opcjonalnym komponentem w magnetyce jest auto-transformator, który tworzy ścieżkę o wysokiej impedancji dla różnicowych sygnałów Ethernet.
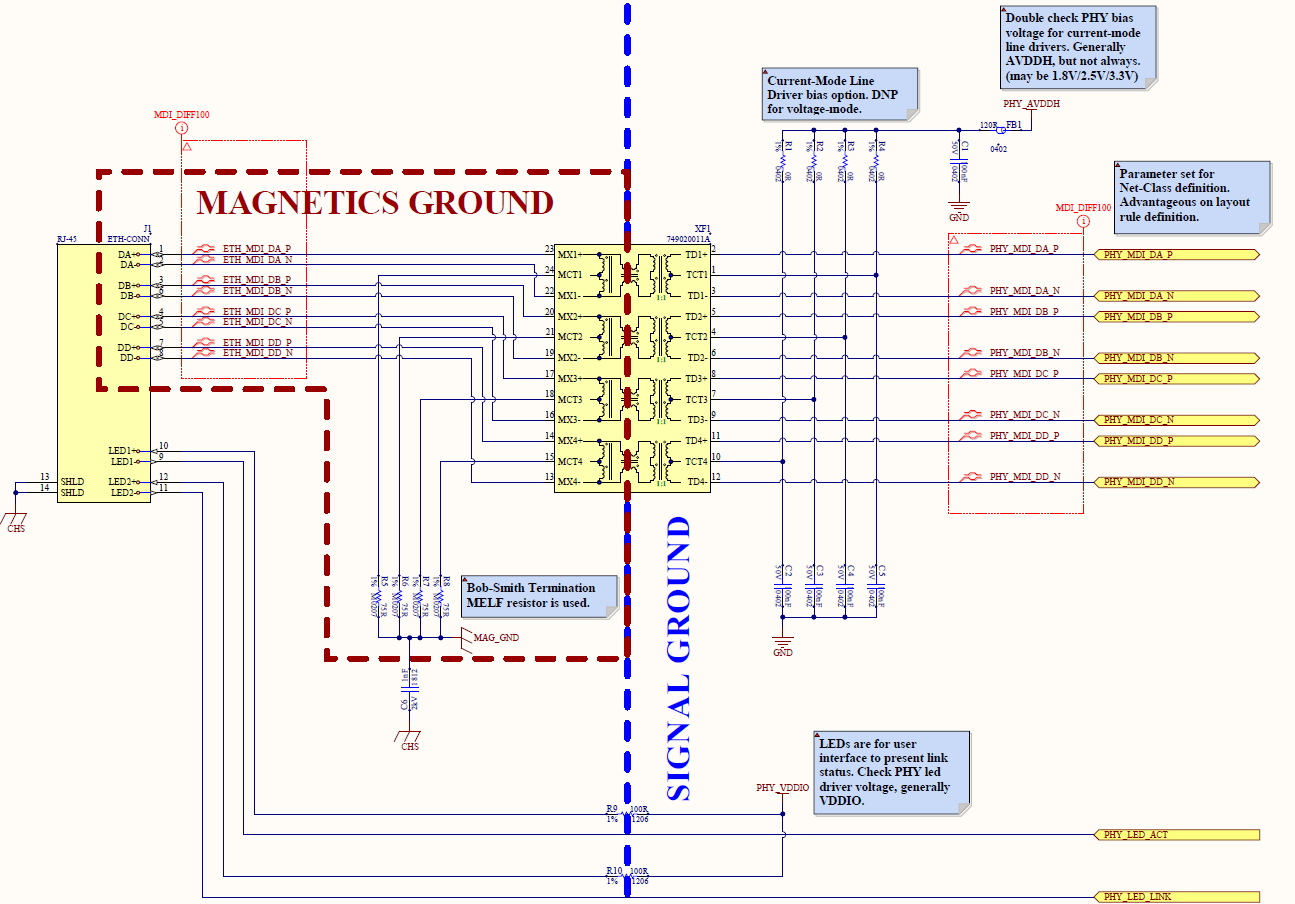
Podsumowując, jak pokazano na rycinie 5 powyżej, transformator izolacyjny 1: 1 i dławik wspólny są zawsze zawarte w magnetyce Ethernet dostępnych na rynku. Łatwą częścią procesu selekcji jest sprawdzenie, czy tolerancja uzwojenia jest mniejsza niż ± 5%, oraz sprawdzenie, czy napięcie izolacji, częstotliwość pracy, CMRR i współczynnik przesłuchu są zgodne ze standardem IEEE dla pinout Gigabit Ethernet Pinout. Wybór magnetycznych za pomocą auto-transformatora jest kolejnym kompromisem dla projektanta, zapewniając zgodność z wymaganiami EMI/EMC na poziomie systemowym plus wszelkie wymagania uzyskane przez władze, takie jak FCC, są istotnymi czynnikami. Wybór opcji 12-winnej magnetyki zwiększy koszty, jednocześnie zmniejszając ryzyko awarii w testach EMC. Alternatywnie, opcja 8 Winding Magnetics jest tańsza i pozwala na dobry projekt układu, ale ryzyko awarii testu EMC może wymagać ograniczenia. Dobrze jest wybrać opcję 12-Winding Magnetics, jeśli interfejs Ethernet jest częścią systemu cyfrowego, który generuje dużo szumu. Jeśli w takich okolicznościach pożądane jest 8, rozważ podłączenie strony CMC z stroną kablową w celu uzyskania lepszej wydajności EMI (pamiętaj, że podłączenie ich na odwrót będzie działać). Tam, gdzie wybierane jest 12, automatyczne transformator powinien być podłączony do strony kablowej, aby uzyskać prawidłowe działanie. Pulse Electronics, Bel Fuse, Halo, Bourns i TDK są ogólnie zaopatrzonymi producentami magnetycznych. Aby uniknąć zamieszania podczas czytania arkusza danych, zazwyczaj etykiety pinu zaczynające się od “MX” mają być połączone z “głoska bezdźwięczna” (kabel) Etykiety z boku i szpilki zaczynające się od “TD” są podłączone do strony Phy.
Radzenie sobie z problemami związanymi z EMC może się wydawać “Czarna magia,” I tak przed przeprowadzeniem testów trudno jest być całkowicie pewnym, czy poziomy będą w granicach. Dlatego projektant musi zastosować każdą dostępną technikę redukcji szumu i przygotować pewne alternatywne opcje ulepszenia gotowe do ograniczenia ryzyka, aby zapewnić, że poziomy są wystarczająco niskie w końcowym projekcie. Niezależnie od topologii w magnetyce Ethernet, zarówno transformator izolacji 1: 1, jak i auto-transformator mają swoje środkowe krany kierowane do pinów, aby zapewnić dodatkowe opcje zakończenia, filtrowania i odchylenia.
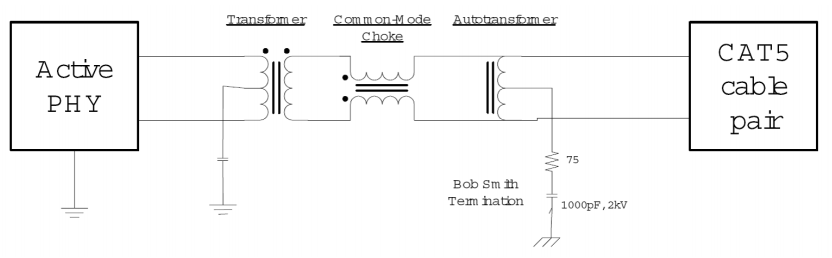
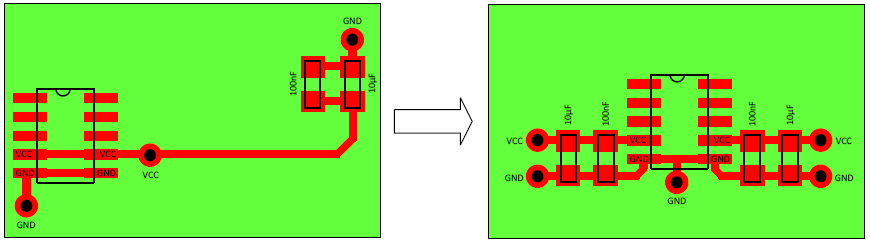
Według patentu Roberta (Bob) w. Smith, relacje z kablami UTP do parowania tworzą linie przesyłowe względem siebie. Jeśli linia transmisji nie zostanie poprawnie zakończona, istnieje możliwość odbicia, która zdegrada jakość sygnału. Aby zapobiec odbiciom, zaleca się, aby każdy środek środkowy po stronie kabla (w tym komponenty 8- lub 12) były osobno zakończone za pomocą rezystora 75-OHMS na uziemieniu podwozia magnetyki. Dobrą praktyką jest również dodanie jednego kondensatora o wysokim napięciu między rezystorem zakończenia a podwoziem, aby utworzyć dodatkowy filtr dla redukcji szumów w trybie wspólnym, podobnie jak topologia zakończenia podzielonego. Należy zauważyć, że każde kran centralny powinien mieć indywidualny rezystor zakończenia, podczas gdy tylko jeden kondensator jest odpowiedni dla wszystkich czterech połączeń podwozia. (Patrz rysunki 6 i 7 poniżej)
Wskazówka: Dobrą praktyką jest stosowanie odpornych na przypływ RELF 75 omów rezystorów terminacyjnych w celu zwiększenia odporności ESD po stronie kabla magnetycznego, chociaż rezystory MEFL są bardzo frustrujące dla asemblerów.
Jeśli chodzi o środkową kran po stronie PHY, należy to ogólnie podłączyć do podłoża sygnału za pomocą kondensatora do dodatkowych celów filtrowania. Podobnie jak rezystory zakończenia Bob-Smitha, każde środkowe kran dla par powinien mieć własne kondensatory, aby zapobiec przepływowi prądu między każdą parą. Ten środkowy kran może być również użyty do dostarczenia wymaganego napięcia odchylenia w trybie wspólnym potrzebnym przez topologię PHY i/lub pociągnąć linię w górę/w dół zgodnie z różnymi konfiguracją linii po stronie PHY. Proszę uważnie sprawdzić arkusz danych PHY, aby określić, które konfiguracje odchylenia i linii mają zastosowanie. Zostaną one omówione dalej w następnej sekcji.
 Gigabit Phy
Gigabit Phy
Mówi się, że PHY jest punktem krytycznym, w którym przesyłanie danych Ethernet z “Cyfrowy” świat “Analog” Występuje światowy świat i odwrotnie. Jak widać na rysunku-8 poniżej, PHY jest ostatnim aktywnym składnikiem, zanim sygnał przejdzie do złącza (i magnetyki) we wszystkich trzech opcjach konfiguracji.
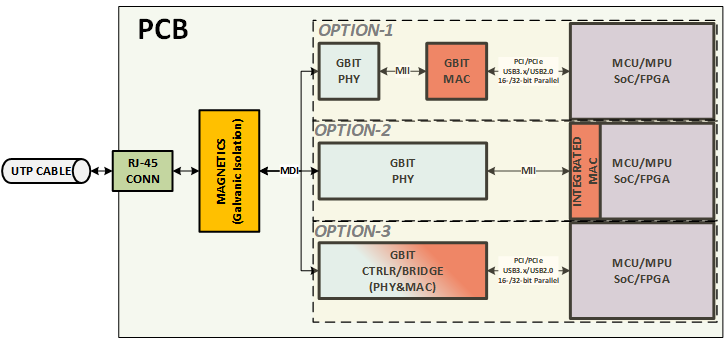
Podczas procesu selekcji PHY tylko dwa podstawowe pytania będą krytycznymi determinantami do wyboru urządzeń, ponieważ większość właściwości zdefiniowanych standardowo jest automatycznie uwzględniona w dowolnym IC PHY. Pierwszym pytaniem jest określenie interfejsu połączenia z urządzeniami warstwy łącza danych (MAC), a drugim pytaniem jest określenie obsługiwanych opcji multimedialnych dla połączenia po stronie kablowej. Jak wcześniej wspomniano, pHY Transceiver ma “Interfejs zależny od mediów” (MDI) dla komunikacji w świecie rzeczywistym i “Niezależny interfejs mediów” (MII) dla MAC Communications. Konwencja nazewnictwa MII może być uważana za ogólną markę, która jest również używana do produktów (i.mi., odnosząc się do całkowicie czarnych ciastek z waniliowym kremem jako Oreo). Dostępnych jest pięć alternatyw, które to MII, RMII, GMII, RGMII i SGMII (krótko mówiąc, zwróćmy się do tych wszystkich jako wszystkich jako wszystkich “XMII”). Każdy z nich zostanie szczegółowo opisany w następnej sekcji. PHY musi mieć odpowiedni interfejs z wybranym MAC. Podobnie należy rozważyć wymaganie na poziomie systemu, takiego jak kabel miedziany i optyka światłowodowa. Jeśli do użycia należy użyć kabla miedzianego UTP, PHY powinien mieć odpowiedni interfejs MDI dla magnetycznych i złącza RJ-45.
Aby zademonstrować ten punkt, należy sprawdzić stronę produktu wybranego PHY w przykładzie projektowym, którym jest KSZ9131. Dostępne są dwie opcje, KSZ9131MNX i KSZ9131RNX. Podczas gdy pierwsza opcja obsługuje GMII/MII, drugi obsługuje tylko RGMII. Jeśli wybrany MAC ma tylko interfejs RGMII, wówczas KSZ9131MNX byłby niewłaściwym wyborem. Nie trzeba wspominać o stronie MDI, ponieważ jest to stosunkowo wyraźniejsze, jeśli chodzi o wybór prawidłowej pHY, z wyborem między interfejsami włókien i miedzianymi.
Czytanie i zrozumienie dowolnego arkusza danych Gigabit PHY może nie wydawać się tak łatwe na pierwszy rzut oka, ponieważ w sekcji Funkcje będzie wymienione wiele standardowych właściwości. O ile nie musisz stworzyć specjalnej implementacji interfejsu Gigabit Ethernet, większość z tych funkcji jest po prostu “Miło jest mieć” Opcje, które mogą ułatwić życie. Postaramy się krótko opisać niektóre z nich, a jeśli uważasz, że potrzebne są dodatkowe informacje dla konkretnej aplikacji, po prostu Google odpowiednie słowo kluczowe:
- Auto negocjacja: Najlepiej jest to zdefiniować jako wzajemną umowę przez urządzenia sieciowe, które dzielą przewodowe połączenie na temat prędkości, dupleksu i kontroli, których powinni użyć do zarządzania korzystaniem z linku. Ta funkcja jest bardzo przydatna do kompatybilności wstecznej i do przodu i jest obowiązkowym wymogiem dla każdego Gigabit Ethernet.
- Auto Mdix (crossover): W przypadku operacji 10/100base pary TX muszą być skierowane do par Rx i odwrotnie. Prymitywnym rozwiązaniem było zmiana kolejności pary w złączu kablowym. Następnie ewoluowało do zmiany kolejności złącza urządzenia (MDI dla prostej kolejności używanej z komputerem i MDIX dla kolejności odwrotnej używanej z przełącznikiem/hubem). Wreszcie, inżynierowie HP opatentowali protokół auto-mdix, który umożliwia PHY decydowanie o parach transmisji/odbierania i ustanowieniu odpowiedniego łącza komunikacyjnego. Głównym powodem korzystania z tej funkcji jest kompatybilność wsteczna i usunięcie potrzeby użycia kabli Crossover UTP, ponieważ pary Gigabit Ethernet są dwukierunkowe i używają różnych algorytmów w PHY, takich jak anulowanie echa.
- Energooszczędny Ethernet (EEE): Jak widać według nazwy, jeśli PHY ma funkcję EEE, to jeśli nie należy wysłać żadnych danych na określony czas, nadajnik jest automatycznie umieszczany w trybie idle o niskiej mocy, informowanie wszystkich podłączonych urządzeń wiedziała, że jest w tym stanie, wysyłając pakiety LPI. Ponieważ odbiornik jest zawsze aktywny, nie ma ryzyka przerwania komunikacji i zazwyczaj może to prowadzić do oszczędności energii powyżej 50%.
- IEEE 1588 Precision Time Protocol (PTP): Ta funkcja jest ogólnie potrzebna aplikacji w czasie rzeczywistym, od automatyzacji fabrycznej po telekomunikację. Zintegrowane funkcje 1588 mogą generować ściśle synchronizowane sygnały Ethernet o niskim zegarku, stempla.
- Zsynchronizowana Ethernet (synchronizacja): W przypadku krytycznej komunikacji czasowej o wysokim punkcie krytycznym, takim jak transfer głosu i wideo w czasie rzeczywistym, buforowanie danych w każdym węźle musi zostać zminimalizowane, w wyniku czego wszystkie węzły muszą być ściśle zsynchronizowane z współdzielonym sygnałem zegara. Synchronizacja jest tworzona w celu przenoszenia informacji o zegarku między węzłami za pomocą urządzeń PHY. Każdy PHY odzyskuje sygnał zegara i używa wewnętrznego lub zewnętrznego PLL do usunięcia dowolnego drgania przed użyciem sygnału do synchronizacji operacji.
PHY Ethernet obejmuje bloki kodowania i modulacji zgodnie ze standardem IEEE w celu przezwyciężenia wszelkich ograniczeń fizycznych, które umożliwiają wydajność kabla CAT5 UTP i certyfikat częstotliwości do 125 MHz. Jeśli PHY wysyła każdy w jednym cyklu zegara (jak 10base), wymagany byłby kabel obsługujący stawkę 1 GHz. Zamiast wysyłać każdy bit w jednym cyklu zegara, 100/1000baza przesyła jeden “Baud” na cykl z zastosowanym kodowaniem. 100base koduje każdą 8-bitową grupę w 10-bitowym pakiecie (schemat 4b/5b lub 8b/10b) w celu zwiększenia niezawodności, co oznacza, że musi wysłać z prędkością 125 mbaud, która wymaga prędkości zegara 125 MHz.
Gigabit Ethernet wykorzystuje modulację PAM-5, która wykorzystuje pięć poziomów napięcia Ethernet i koduje dwa bity na cykl zegara przy użyciu czterech różnych poziomów napięcia w każdej parze; Piąty poziom napięcia jest używany do korekcji błędów. Główną różnicą między 100base a 1000basem jest to, że Gigabit Ethernet używa wszystkich czterech par dwukierunkowo i jednocześnie. Korzystając z podstawowej matematyki, widzimy, że 1000 Mbps / 4 = 250 Mb / s na parę, a kodowanie dwóch bitów w każdym cyklu powoduje szybkość zegara 125 MHz. Tak więc, stosując tę samą szybkość BAUD i częstotliwości zegarową, co Fast Ethernet, Gigabit Ethernet bardziej wydajnie wykorzystuje wszystkie dostępne zasoby i zwiększa prędkość łącza, jednocześnie utrzymując certyfikowane granice stosunkowo taniego kabla CAT5, a nie do korzystania z droższych kabli wyższych kategorii.
Zastosowana modulacja/kodowanie jest bardzo powszechne w całym świecie komunikacji, a wszystkie transceiverowie nie powinny mieć problemu z powodzeniem modulując i demodulując (mod/demod) sygnały Ethernet. Ponieważ Gigabit Ethernet PHY jest kompatybilnym z wstecznym urządzeniem nadkrzestnikowym, możemy zrozumieć, dlaczego potrzebuje zarówno źródła zegara 10 MHz (10base), jak i 125 MHz (100/1000base) dla procesów mod/demod. Ponadto dodatkowe odniesienia do zegara, takie jak 2.5 MHz, 25 MHz lub 125 MHz może być wymagane do PHY-to-Mac “XMII” Komunikacja w zależności od wybranego typu interfejsu. Zasadniczo PHY będzie miało również wyjście zegara 25 MHz lub 125 MHz do synchronizacji z innymi phys lub jako odniesienie wejściowe dla urządzenia MAC.
Wszystkie ethernet dostępne na rynku mają wewnętrzny syntezator zegara PLL, więc potrzebuję kryształu odniesienia lub oscylatora, ogólnie przy 25 MHz. Zawsze dobrym pomysłem jest sprawdzenie dwukrotnego arkusza danych, aby sprawdzić, czy ma on wbudowany kryształowy sterownik, który sprawia, że może używać kryształu. Zasadniczo zaleca się, aby wymagania dotyczące dokładności były lepsze niż 50 ppm, a wykorzystanie oscylatora może ułatwić układ. Ponownie jest to kompromis dla projektantów pod względem ceny, stabilności i wysiłku. .
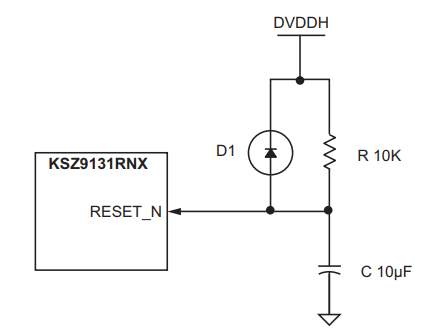
“pasek” Lub “Bootstrap” Terminologia używana dla urządzeń Ethernet określa ustawienia o twardej kodowaniu parametrów, takie jak adres urządzenia, tryb, wybór XMII, włączenie zegara itp. Przed ukończeniem urządzenia. Zdecydowanie zaleca się uważne sprawdzenie arkusza danych dla opcji paska, ponieważ są one zależne od dostawcy i mogą ulec zmianie między każdym urządzeniem. Kluczową kwestią jest skorygowanie wymaganego czasu resetowania, aby piny paska do osiedlenia się na pożądanym poziomie napięcia, które można łatwo dostosować za pomocą obwodu opóźnienia RC.
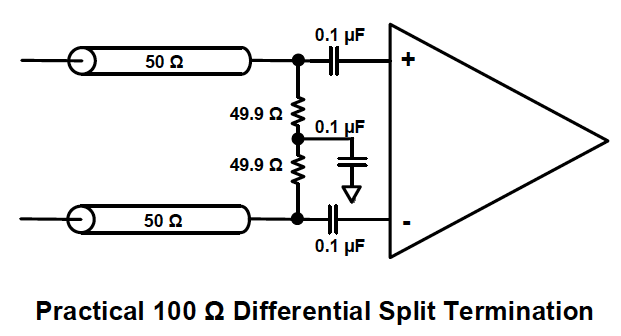
Innym punktem związanym z wyborem PHY jest sprawdzenie, czy ma on wewnętrzne rezystory zakończenia, czy nie. Ich obecność ma kluczowe znaczenie dla integralności sygnału, zarówno dla stron MDI, jak i MII. MDI używa zrównoważonych par różnicowych, więc jeśli PHY nie ma rezystorów zakończenia na chipie, należy dodać do płyty równoległe zakończenie podziału (preferowane do filtrowania szumu wspólnego). Podobnie interfejs XMII powinien mieć seryjne rezystory terminacyjne, na chip.
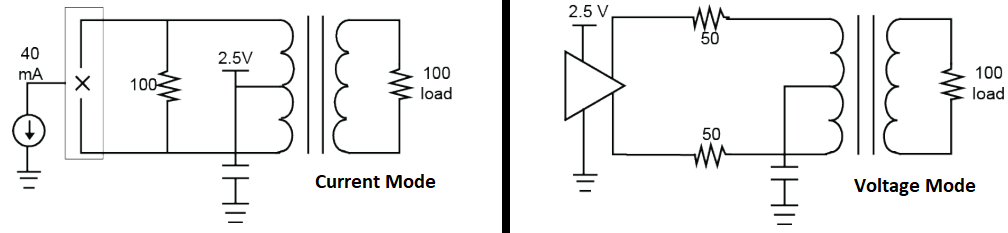
Jak krótko wspomniano, opisując użycie Tuty. Projektant powinien sprawdzić sterownik linii PHY pod kątem połączenia centrum centralnego magnetyki i podziału zakończenia zakończenia. Ponieważ sterowniki w trybie napięcia mają różne zalety w stosunku do trybu prądu, ten typ sterownika linii jest bardziej powszechny wśród urządzeń. Jednak projektant powinien nadal być świadomy wymagań sterownika linii obecnego dla różnych aspektów projektowych.
Wskazówka: Aby uzyskać dalsze odczyt, sprawdź mikrosemi “ENT-AN0106 Uwaga aplikacji”.
Większość urządzeń Ethernet (PHY, Mac i Switch) potrzebuje 1.2 V szyna zaopatrzenia dla rdzeni analogowych i cyfrowych, a także dla zasilania PLL. Inne zapasy analogowe, cyfrowe i IO są zwykle wybierane od 3.3 V, 2.5 V i 1.8 V, a arkusz danych musi być dokładnie sprawdzony pod kątem wymaganego schematu zasilacza. Aby umożliwić działanie jednorazowe, urządzenie może mieć zintegrowany kontroler LDO (e.G., w KSZ9131), który napędza FET do regulacji 3.3 V lub 2.5 V Dostaw do wymaganego 1.Dostawa 2 V. Jeśli tablica ma już osobny 1.Zasilacz 2 V, wówczas ta opcja może nie być potrzebna. Ponieważ wybór FET jest ściśle związany z kontrolerem, projektanci powinni przestrzegać zaleceń w arkuszu danych dla specyfikacji FET.
Chociaż zostanie szczegółowo opisany w następnej sekcji, warto wspomnieć, że PHY i Mac powinny mieć połączenie interfejsu zarządzania “XMII” Połączenia w celu ustalenia prawidłowej komunikacji.
Po wybraniu prawidłowego PHY w celu spełnienia wymagań i przestrzeganiu powyższych zaleceń, projekt schematyczny jest dość standardowy, niezależnie od wybranego urządzenia i postępuje zgodnie z tymi krokami:
- Zapewnij prawidłową zasilanie do szyn z kondensatorami luzem i lokalnym oddzieleniem
- Połączenia z magnesami i złączem z diodami diodami LED
- Połączenia z Mac z XMII
- Połączenia z MAC dla interfejsu zarządzania (MIIM)
- Podaj prawidłowe wejście zegara
- Sprawdź i zorganizuj “pasek” opcje
- Sprawdź i zorganizuj opcje zakończenia i odchylenia
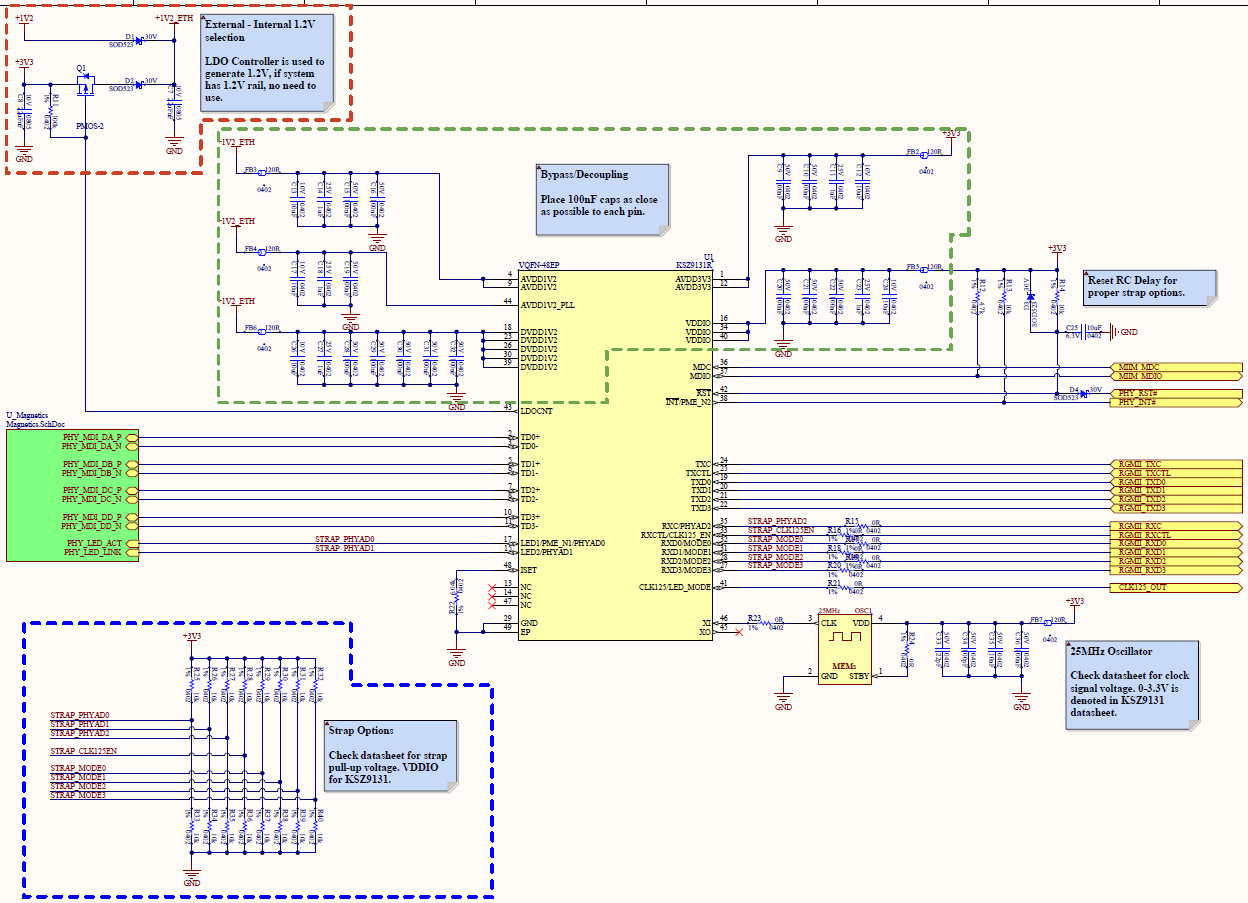
Przykładowy schemat projektu przy użyciu pHys KSZ9131 podano na rysunku 13 poniżej. Niektóre notatki objaśniające i połączenia PIN specyficzne dla urządzenia są podane wewnątrz schematu. Można znaleźć schematyczne pliki dla tej liczby na GitHub, tak jak to’jest o wiele łatwiejszy do oglądania w Altium Designer.
Digitalizowane i zdemodulowane/dekodowane dane są przesyłane do urządzenia warstwy łącza danych Mac za pośrednictwem za pomocą urządzenia “XMII” interfejs niezależny od mediów. Większość wariantów MII (z wyjątkiem SGMII) to równoległe interfejsy i są podobne do równoległej magistrali pamięci. Przesyłane i odebrane sygnały Ethernet muszą być zsynchronizowane za pomocą sygnałów zegara. . Właśnie dlatego posiadanie co najmniej jednego pinu GPIO może być cenne dla przyszłej do zabezpieczenia ogólnego projektu.
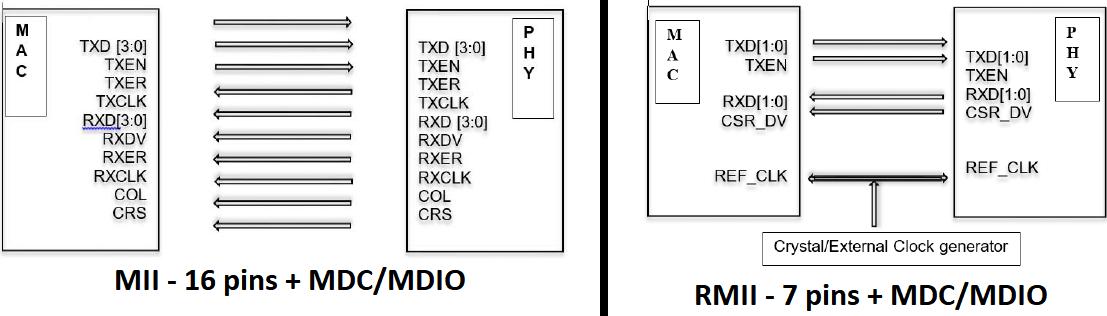
Na samym początku interfejs Ethernet o długości 10/100 Mb/s z MII oparty na zegarach 25 MHz miał 16 pinów. Następnie, wraz z pojawieniem się trybu zredukowanego MII (RMII), częstotliwość zegara została podwojona do 50 MHz, a liczba pinów zmniejszono do 7. Ponieważ przepustowość danych MII i RMII nie nadaje się do Gigabit Ethernet, wygraliśmy’t W tym artykule wchodzisz szczegółowo w tym artykule dla tych dwóch typów urządzeń, z wyjątkiem listy pinów na rysunku 14 poniżej.
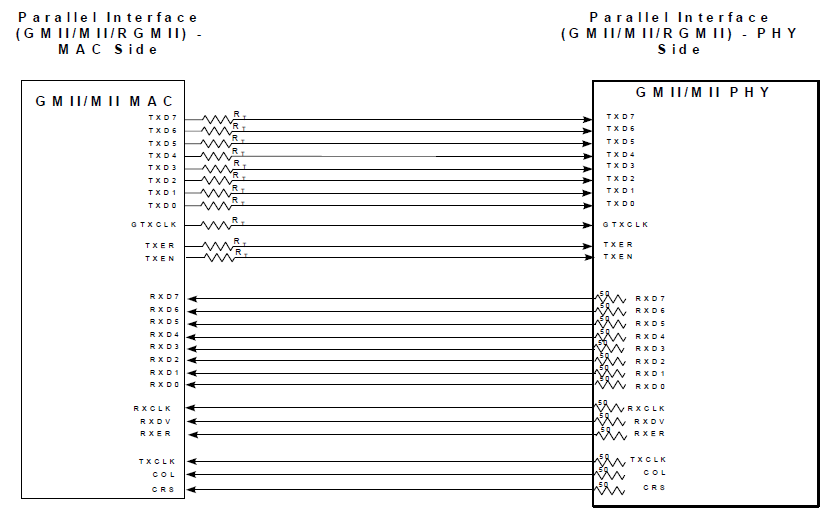
Gigabit-MII (GMII) obsługuje maksymalne prędkości 1 Gb / s przy użyciu szybkości zegara 125 MHz, wykorzystuje 25 pinów i jest całkowicie kompatybilny z specyfikacją MII. Opisy sygnałów podano w tabeli 2 poniżej.
Tabela 2. Lista sygnałów GMII
| Nazwa sygnału | Opis sygnału | Sygnał reżyserski | |
| TXD [7..0] | Dane do przesyłania | MAC do Phy | Nadajnik |
| Gtxclk | Sygnał zegara dla 1 Gb / s (125 MHz) | MAC do Phy | |
| Txclk | Sygnał zegara dla 10/100 Mbps (2.5/25 MHz) | MAC do Phy | |
| Txen | Nadajnik włącza | MAC do Phy | |
| Txer | Błąd nadajnika (w razie potrzeby celowo uszkodzony pakiet) | MAC do Phy | |
| RXD [7..0] | Otrzymane dane | PHY do Mac | Odbiorca |
| Rxclk | Otrzymany sygnał zegara (odzyskany z otrzymanych danych) | PHY do Mac | |
| RXDV | Dane prawidłowe sygnał | PHY do Mac | |
| Rxer | Odbierać błąd | PHY do Mac | |
| PRZEŁĘCZ | Wykrywanie zderzenia tylko dla trybu pół-dupleksu | PHY do Mac | |
| CS (CRS) | Sens nośnika tylko dla trybu pół-dupleksu | PHY do Mac |
Zmniejszone GMII (RGMII) jest prawie najpopularniejszym gigabitowym PHY dla interfejsu MAC, ponieważ zmniejsza liczbę sygnałów o połowę w porównaniu z GMII i jest podobny do Mii/RMII. W przypadku komunikacji Gigabit dane są taktowane zarówno na spadających, jak i rosnących krawędzi zegara 125 MHz, co powoduje połowę liczby sygnału danych. Jeśli potrzebna jest kompatybilność wsteczna z komunikacją 10/100 Mb/s, wówczas do przechowywania danych wykorzystywana jest tylko wznosząca się krawędź. Oprócz redukcji sygnału danych model RGMII Modelipleks czasowy sygnał TXEN z sygnałem TXER w TXCTL i RXDV z sygnałem RXER w RXCTL, jednocześnie eliminując sygnały COL i CRS. Dla RGMII używanych jest łącznie 12 pinów sygnałowych, a opisy sygnałów podano w tabeli 3 poniżej.
Tabela 3. Lista sygnałów RGMII
| Nazwa sygnału | Opis sygnału | Kierunek sygnału | |
| TXD [3..0] | Dane do przesyłania | MAC do Phy | Nadajnik |
| TXC | Przekazywać zegar 2.5 MHz dla 10 Mbps 25 MHz dla 100 Mbps 125 MHz dla 1 Gbps (podwójna krawędź) | MAC do Phy | |
| TXCTL | Multipleksowanie TXEN i TXER Na wznoszącym się zegarku: TXEN Na opadającym zegarku: (TXEN XOR TXER) | MAC do Phy | |
| RXD [3..0] | Otrzymane dane | PHY do Mac | Odbiorca |
| RXC | 2.5 MHz dla 10 Mbps 25 MHz dla 100 Mbps 125 MHz dla 1 Gbps (podwójna krawędź) | PHY do Mac | |
| Rxctl | Multipleksowanie RXDV i RXER Na spadającej krawędzi zegara: (rxdv xor rxer) | PHY do Mac |
Sygnał TXC jest dostarczany przez MAC, a PHY dostarcza sygnał RXC. Oba są sygnałami zegara synchronizowanymi przez źródło i używają zarówno spadających, jak i rosnących krawędzi zegara, co sprawia, że czas bardziej krytyczny. Standard RGMII wymaga dodania opóźnienia zegara między 1.5 ns i 2 ns zarówno dla sygnałów TXC, jak i RXC, aby zapewnić, że prawidłowe sygnały danych są przetwarzane podczas upadków i rosnących krawędzi. Na szczęście większość urządzeń PHY i MAC obsługuje RGMII-ID (opóźnienie międzynarodowe RGMII) i nie jest potrzebne dalsze działanie, aby włączyć tę funkcję identyfikatora i dostosować czas opóźnienia. . Jeśli nie jest to obsługiwane przez jedno lub oba urządzenia, opóźnienie musi być zastosowane jako część układu PCB za pomocą prawidłowo zaprojektowanych serpentin, jak pokazano na rysunku 15 poniżej.
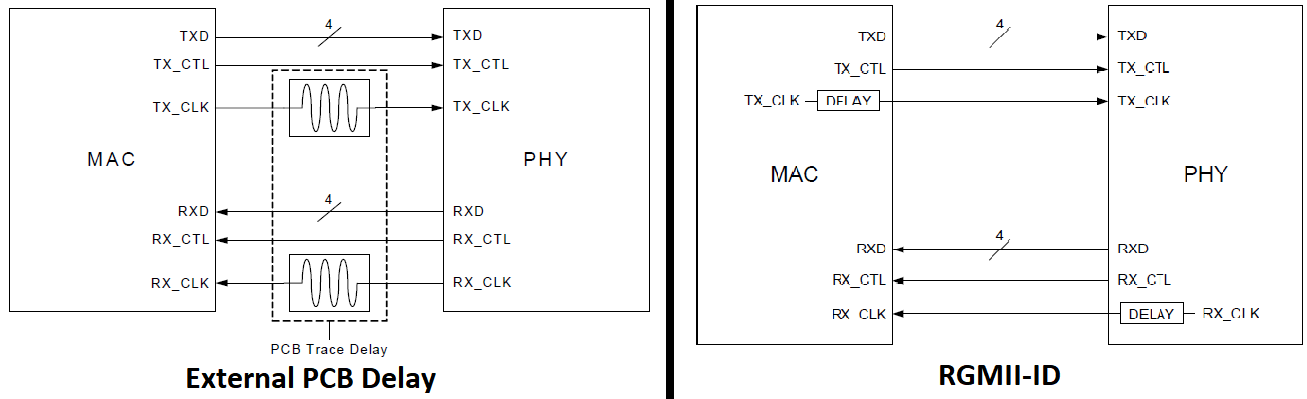
Patrząc na rysunek 15, możesz przyciągnąć uwagę na jeden dziwny punkt: sygnały TX po stronie Mac są podłączone do sygnałów TX po stronie Phy. Wynika to z konwencji nazewnictwa; Każdy nadajnik i odbiornik nazywa się w odniesieniu do strony Mac, co oznacza, że sygnały po stronie PHY, które są oznaczone TX i Rx, odpowiadają odpowiednio odbiornikowi PHY i nadajnikowi PHY. Zawsze sprawdź dwukrotnie konwencje nazewnictwa przed zaprojektowaniem układu Ethernet.
Jedno-końcowe topologie magistrali równoległych wymagają zakończenia serii po stronie sterownika, aby dopasować zarówno impedancję sterownika wyjściowego, jak i impedancję charakterystyczną linii, aby zapobiec odbiciom i problemom EMI. Sygnały XMII muszą wynosić 50 omów, jedno-końcowe, a sygnały TX muszą być dopasowane do TXC (TXCLK). Podobnie sygnały Rx muszą być dopasowane do długości do RXC (RXCLK). Projektanci powinni sprawdzić arkusz danych PHY i MAC pod kątem obecności wewnętrznych rezystorów terminacyjnych, a jeśli nie istnieją, muszą być umieszczone na pokładzie. Wartość rezystora będzie różnicą między Z0 = 50 omów a impedancją wyjściową linii. Ogólnie rzecz biorąc, wartości od 20 omów do 40 omów będą działać, ale konieczne mogą być niektóre próby i błędy, aby uzyskać najlepszą wydajność.
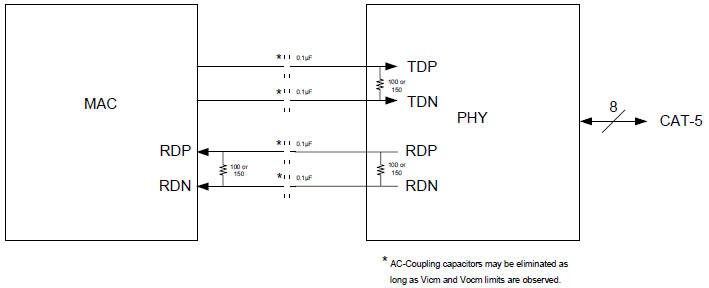
Serial GMII (SGMII) to zupełnie inna koncepcja w porównaniu z innymi trybami, ponieważ jest podobny do serializatora/deserializatora (SERDES), przy użyciu jednej pary TX, jednej pary RX i jednej pary zegara odniesienia. Częstotliwość zegara wynosi 625 MHz DDR, który jest stosunkowo wysoki. Równoległe dane GMII są kodowane za pomocą formatu 8b/10b, do par TX i RX. SGMII zmniejsza liczbę pinów i zwiększa prędkość, ale minus jest taki, że układ jest bardziej skomplikowany niż w przypadku metod XMII. . Jeśli projekt potrzebuje interfejsu 1 G+ Ethernet, SGMII jest jedyną opcją dla połączenia PHY do Mac.
Większość szybkich interfejsów SERDES wymaga sprzężenia pojemnościowego, aby zapobiec niedopasowaniu napięcia w trybie odbiornika. Zaleca się mieć przynajmniej symbole zastępcze dla 100 kondensatorów serii NF blisko strony TX par SGMII, wraz z równoległymi rezystorami terminacyjnymi zgodnie z impedancją parami różnicową (zwykle 100 omów lub 150 omów).
Oprócz wyżej wymienionych interfejsów XMII’ Liczba pinów, należy dodać dwa sygnały dla interfejsu zarządzania MII (interfejs MIIM lub MDIO/MDC). Ten interfejs jest podobny do magistrali I2C i jest używany przez urządzenia wyższego poziomu (takie jak MAC) do uzyskania statusu PHY i zaprogramowania rejestrów PHY do dostrojenia zmiennego parametrów czasu wykonania, takich jak ustawienia zegara i procedury naprawy. Sygnał MDC to zegar 25 MHz dostarczany przez MAC, a MDIO jest dwukierunkowym sygnałem danych o otwartym dniu, więc MDIO musi zostać podciągnięte zgodnie ze współdzieloną liczbą urządzeń PHY (ogólnie potrzebuje rezystora między 1 1.5 K Ohmy i 10 kilogramów). Oprócz definiowania interfejsu zarządzania szeregowego (SMI) przy użyciu tych samych pinów, niektórzy producenci również wewnętrznie używają pinów MDC/MDIO do mostowania do I2C lub SPI w celu ułatwienia wykorzystania, szczególnie w przełącznikach Ethernet.
Przełączniki Ethernet
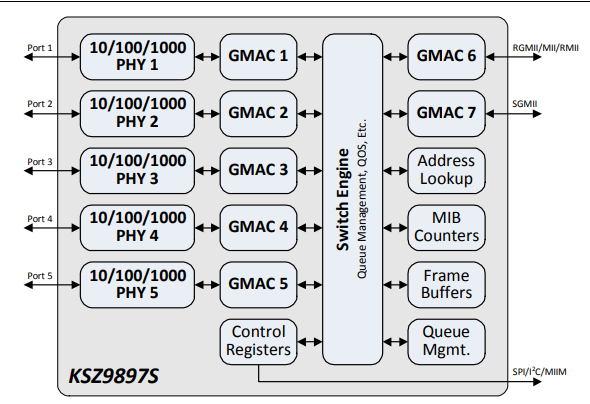
Warto wspomnieć, że może nie być konieczne dodawanie wielu urządzeń Ethernet PHY i MAC na płycie obwodowej, chyba że istnieją surowe wymagania dotyczące fizycznego rozdziału interfejsów. Multiport PHY i/lub przełączniki Mac są popularnym sposobem zwiększenia liczby interfejsu Ethernet za pomocą jednego urządzenia. Niektóre przełączniki mają tylko interfejsy PHY do przełącznika, a niektóre inne łączą interfejsy PHY i Mac (XMII). Istnieje wiele alternatyw; Na przykład KSZ9897S jest opcją, która łączy 5-port PHY, 1-port RGMII/GMII/MII i 1-portowy SGMII (patrz rysunek 18).
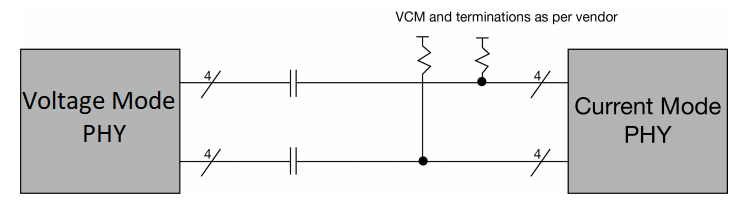
Oczywiste jest, że jeśli nie projektujesz czystego przełącznika Ethernet, który bezpośrednio prowadzi wszystkie interfejsy PHY do złącza RJ-45, może istnieć opcja podłączenia kolejnego PHY do przełącznika PHY. Najlepszą praktyką jest użycie transformatorów izolacyjnych dla wszystkich interfejsów PHY znajdujących się na planszy, podobne do operacji złącza RJ-45. Jednak ta metoda jest droga i zużywa dużo miejsca na planszę. Istnieje opcja teoretyczna na połączenie PHY do PHY na tablicy, zwane Ethernetem płyty backnambrycznej, która nie wymaga transformatorów. Zamiast tego wszystkie pary są sprzężone pojemność przy użyciu kondensatorów serii 100 NF. Chociaż nie gwarantuje się pracy na duże odległości, teoretycznie działa bardzo dobrze na stosunkowo krótkich odległościach. Jeśli spróbujesz, nie zapomnij dodać rezystorów odchylenia po kondensatorach sprzęgania prądu przemiennego, jeśli i tylko wtedy, gdy jeden z phy’S ma sterownik linii trybu prądowego (patrz rysunek 19).
 Rozważania dotyczące układu dla Ethernet
Rozważania dotyczące układu dla Ethernet
Po przeczytaniu setek stron arkusza danych, masz doskonale zaprojektowany schemat, który spełnia wszystkie wymagania i sugestie, które producenci zasugerowali – jednak cały ten wysiłek można łatwo zrujnować lub obniżyć wydajność ze względu na podstawowe awarie układu Ethernet. W celu zaprojektowania interfejsu Gigabit Ethernet należy wziąć pod uwagę kontrolowane przez impedancje sygnały różnicowe i jednokierunkowe, a także pewne dopasowanie długości i ograniczenia maksymalnej długości. Przez większość czasu wymagania te są automatycznie spełnione przez rozsądne umieszczenie komponentów, chyba że projektant próbuje zastąpić to podejście. Problem polega na tym, że jeśli ogólne reguły układu Ethernet nie są przestrzegane (takie jak nie używanie solidnych płaszczyzn referencyjnych dla śladów kontrolowanych impedancją Ethernet), marnuje wysiłek, aby ściśle dopasować długości śledzenia lub utrzymanie ich poniżej maksymalnej długości długości. Dlatego krótko opiszemy ogólne reguły układu szybkiego, zanim zostaną omówione określone wymagania układu Gigabit Ethernet, aby zapewnić podstawę bardziej szczegółowych wymagań.
Zasilacz
Szybkie przełączanie cyfrowych prądów popytu przejściowego. Te przejściowe prądy powinny być dostarczane przy użyciu kondensatorów obejściowych/oddzielenia, ponieważ impedancja pasożytniczych śladu PCB, między szpilką zasilania a szyną mocy, będzie miał składnik indukcyjny (w zależności od szerokości śladu), który opiera się prądom przejściowym. Główną zasadą jest umieszczenie kondensatorów obejściowych jak najbliżej wszystkich pinów zaopatrzenia, z co najmniej jednym kondensatorem 10 NF i 100 NF dla każdego pinu.
W przypadku płyt wielowarstwowych istnieją oddzielne samoloty mocy i uziemiające, więc VIA nieuchronnie będą używane na ścieżce używanej do dostarczania energii. . Ta zasada jest zilustrowana na rysunku 20 poniżej.
Płaszczyzna odniesienia
Podstawową zasadą dla całej elektroniki jest to, że prąd przepływający w obwodzie Ethernet zawsze powraca do jego źródła. Tak więc zawsze powinna istnieć ścieżka powrotu dla sygnałów, a ta ścieżka powrotu utworzy antenę pętlową ze ścieżką sygnału wychodzącego. Jeśli obszar pętli jest niewielki, wówczas nie zostaną utworzone problemy EMI/EMC, ale jeśli z jakiegoś powodu obszar pętli stanie się większy, projektant może znaleźć poważne problemy EMI/EMC. Te problemy EMI/EMC mogą poważnie obniżyć wydajność urządzenia w sposób, którego się nie spodziewasz, a przynajmniej prawdopodobnie spowoduje, że nie zdarzy ci się nie testować EMC, gdy szukasz certyfikatów wymaganych do legalnego wprowadzenia/sprzedaży produktu.
W oparciu o teorię i dowody eksperymentalne dla sygnałów szybkich, obecna ścieżka powrotu będzie podążać śladem warstwy, która jest pod nią. Innymi słowy, jest to płaszczyzna odniesienia. Utrzymanie solidnej płaszczyzny odniesienia poniżej dowolnego routingu sygnału o dużej prędkości zminimalizuje obszar pętli i zapobiegnie nieciągłości impedancji. Jeśli z jakiegokolwiek powodu utworzone są puste pusteczki pod prędkością, do utworzenia ścieżki powrotnej należy użyć kondensatorów zszywki. Zaleca się również zastosowanie kondensatorów zszywania, jeśli płaszczyzna zasilania jest również płaszczyzną odniesienia dla szybkiego sygnału, który tworzy ścieżkę powrotną do źródła bieżącego. Zasady te są zilustrowane na rysunku 21 poniżej, pokazując złe praktyki po lewej i dobre praktyki po prawej stronie.

 Układ
Układ
W celu poprawy wydajności EMI/EMC i ułatwienia routingu kontrolowanych impedancją, dobrym pomysłem jest mieć co najmniej cztery warstwy (e.G., Górna – uziemienie – moc/uziemienie – dół). Nie oznacza to, że niemożliwe jest użycie dwupowastanowej płytki drukowanej dla interfejsu Gigabit Ethernet. Jeśli podano solidną płaszczyznę odniesienia dla sygnałów krytycznych, ślady ochronne są kierowane dla sygnałów MDI, a na koniec, jeśli nie ma wymogu zgodności EMI/EMC, najprawdopodobniej działałoby to na ławce laboratoryjnej. Dwuwarstwowe płyty powinny jednak być naprawdę używane tylko do eksperymentów i prototypowania, ponieważ czterowarstwowe płyty są tylko nieco droższe niż dwumiejscowe u większości producentów-korzyści płynące z tablicy 4+ są warte drobnego dodatkowego kosztu kosztów.
Śledzenie właściwości i geometria
Każdy ślad na PCB będzie miał charakterystyczną impedancję, obliczoną w odniesieniu do płaszczyzny odniesienia. Altium Designer ma wbudowane narzędzia do obliczania impedancji; Jednak w przypadku sygnałów szybkich, istnieje wiele innych narzędzi, które pomogą w symulacji wydajności i weryfikacji obliczeń. Dostępnych jest wiele formuł matematycznych, a także narzędzia obliczeniowe, takich jak “Narzędzie Saturn PCB (bezpłatne)” oraz licencjonowane narzędzie oferowane przez instrumenty polarne, które mogą wykonywać te obliczenia.
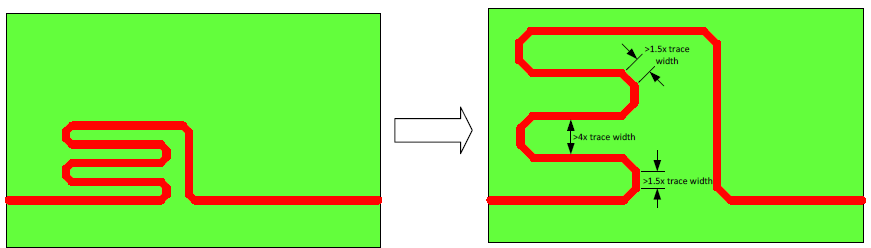
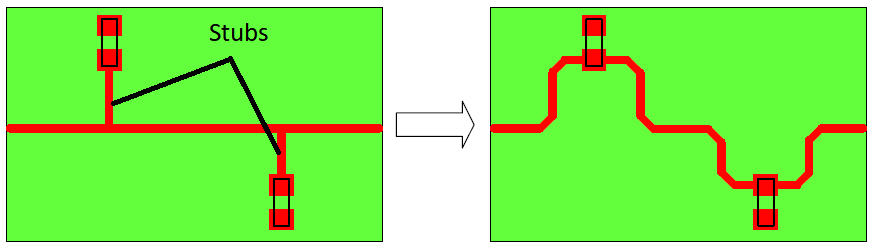
Wymagana szerokość śledzenia i odstępy dielektryczne można łatwo obliczyć dla wymaganej impedancji zgodnie z stosem PCB. Ogólnie rzecz biorąc, stosowanie zakrętów 45 ° jest lepsze niż użycie 90 ° zakrętów. Jednocześnie ślady, serpentiny i pary są lepsze, jeśli są one oddzielone jak najwięcej, aby zapobiec przesłaniu i zwiększeniu odporności na usterki. Ponadto należy unikać użycia odcinków. Wreszcie, aby zapobiec przesładzie między sąsiednimi warstwami, należy unikać żadnego równoległego routingu sygnału wzdłuż warstw. Zasady te są zilustrowane na rysunku 22 poniżej, pokazując złe praktyki po lewej i dobre praktyki po prawej stronie.
 Linie przesyłowe
Linie przesyłowe
Wiemy, że anteny mikrostrypowe i anteny gniazda są zaprojektowane w celu celowego tworzenia pól elektromagnetycznych do transmisji i odbioru. Słabo zaprojektowana PCB może również przypadkowo mieć wiele niezamierzonych anten, które promieniują na różnych częstotliwościach. Jeśli ślad jest linią przesyłową, odbicia mogą być naprawdę dużym problemem. Podczas układania śladów projektant powinien z grubsza oszacować, czy długość śladu może działać jako antena i zamienić przeprowadzony sygnał w promieniowany sygnał i czy potrzebny jest rezystor zakończenia, aby zapobiec odbiciu. Poniższe przykłady, oparte na niektórych zasadach, wyjaśnią te problemy.
Najpierw pomyśl o problemie anteny. Najwyższe poziomy promieniowania uzyskuje się, jeśli długość śladu anteny wynosi λ/4, λ/2 lub λ. Jeśli jednak długość jest krótsza niż około λ/20 częstotliwości nośnej, oczekuje się, że nie zaobserwowano żadnego efektu anteny. Z reguły używamy liczby λ/40, aby maksymalna długość była po bezpiecznej stronie.
Drugi problem pochodzi z czasu wzrostu sygnału, ponieważ jest on bezpośrednio związany z przepustowością. Im bardziej krawędzie, tym wyższa przepustowość. W przypadku konfiguracji mikropaskowej na płycie FR4 sygnał przemieszcza się z prędkością 6.146 ps/mm. Myślenie o sygnały, który ma czas wzrostu 340 ps, ślad może być nie zakończony, jeśli jest krótszy niż długość (1/10)*(340/6.146) = 5.53 mm. Zawsze lepiej jest mieć rezystor zakończenia, ale krótszy ślad oznacza, że nie powinno być problemów z odbiciami i falami stojącymi.
Ponieważ zasady dotyczące projektu układu obwodu szybkiego Ethernet są ogromnym tematem, prawie niemożliwe jest dotknięcie wszystkich aspektów w tym krótkim artykule. Podobnie jak ogólne reguły, które są wspomniane krótko, poniższa tabela zawiera typowe ograniczenia i wymagania układu Gigabit Ethernet.
Tabela 4. Wymagania dotyczące układu Gigabit Ethernet
| Interfejs | Parametr | Wymóg |
|---|---|---|
| MDI | Impedancja śledzenia | Różnica 100 Ω (95 Ω ± 15%) |
| MDI | Wymaganie o zakończenie | Zakończenie równoległe (100 Ω lub podzielone 2 x 49.9 Ω) |
| MDI | Max. Skewki wewnątrz par | |
| MDI | Max. Skewki między parami | |
| MDI | Max. Długość śladu między PHY i magnetyki | |
| MDI | Min. Odstępy od pary | > 450 um |
| MDI | Max. Dozwolone przez | 2 przelotki dla wszystkich śladów MDI |
| XMII | Impedancja śledzenia | 50 Ω pojedynczy (50 Ω ± 15%) |
| XMII | Wymaganie o zakończenie | Zakończenie serii (od 20 Ω do 40 Ω zgodnie z impedancją wyjściową sterownika) |
| XMII | Max. Obciążenie napędu | 35 PF – Te wyjścia interfejsu nie są zaprojektowane do napędzania wielu obciążeń, złączy lub kabli. Lepiej jest, jeśli są używane na pokładzie. |
| XMII | Zalecany maks. Długość śledzenia | 50 mm |
| XMII | Max. Długość śledzenia | 150 mm – tylko wtedy, gdy wszystkie ślady są umieszczane na wewnętrznych warstwach (nie zalecane) |
| XMII | Tolerancja dopasowania długości | 10 mm – sygnały TX z sygnałami TXC (TXCLK) i RX z RXC (RXCLK) |
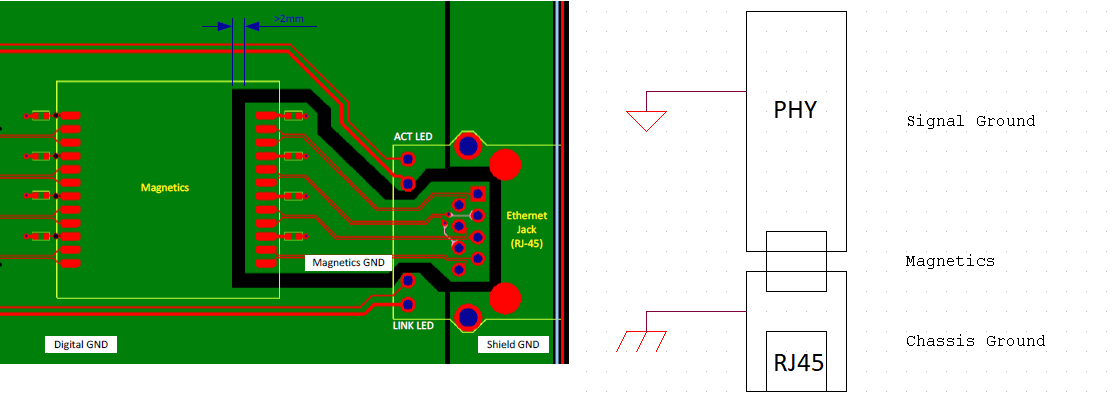
Oprócz tych określonych ograniczeń, dyskretny układ magnetyki może również wymagać specjalnej opieki. Należy utworzyć osobną płaszczyznę uziemienia, aby zapewnić ulepszoną odporność na ESD i EMI/EMC, i powinna być ściśle oddzielona od wszystkich innych płaszczyzn co najmniej 2 mm (patrz ryc. 23).
Wniosek
Celem tego artykułu jest poprowadzenie każdego projektanta, który chce dodać interfejsy Gigabit Ethernet Pinout do swoich płyt obwodowych, a my próbowaliśmy pokryć wszystkie główne aspekty teoretyczne. Blog Altium Designer ma wiele artykułów, które nurkują w głębokości w szybkim routingu, dopasowaniu Ethernet i innych tematach związanych z udanym routingiem Gigabit Ethernet i innych sygnałów obwodów dużych prędkości. Ten przewodnik powinien dostarczyć dobrego podstawy, w jaki sposób techniki routingu w Gigabit Ethernet w szczególności.
Podczas gdy ja’starałem się zapewnić dobry przewodnik po podstawach udanego routingu Gigabit Ethernet’zawsze dobrym pomysłem, aby śledzić zalecany układ i wytyczne w arkuszu danych ICS, z którym pracujesz. Jako kontynuację tego artykułu, my’Patrzy na konfigurowanie reguł projektowych specjalnie dla Gigabit Ethernet. Posiadanie odpowiednich zasad projektowania może mieć wpływ między bolesnym routingiem a frustrującym prototypowaniem/testowaniem, a projektantem Altium zmuszając projekt do sukcesu.
Praca z Gigabit Ethernet może rzucić wyzwanie po raz pierwszy, jednak nie więcej niż jakikolwiek inny interfejs obwodów dużych prędkości. Wymagania implementacji Gigabit Ethernet są prawdopodobnie najbardziej wybaczające, jeśli chodzi o szybkie interfejsy. Korzystając z dobrych praktyk układu i routingu, a także prawidłowe zakończenie i inne wybory komponentów w twoim schemacie, Twój projekt prawdopodobnie odniesie duży sukces. Korzystanie z 4 lub więcej warstw na płycie drukowanej Ethernet znacznie złagodzi routing twojego projektu, zwiększając szansę na sukces. Może to również pomóc w zapewnieniu postępowania różnych schematów uziemienia w Gigabit Ethernet.
? Więcej pytań na temat impedancji różnicowej Ethernet? Porozmawiaj z ekspertem w Altium.
Gigabit Ethernet Switch z zasilaczem UE – 4 -port

Ten kompaktowy przenośny przełącznik Ethernet Gigabit umożliwia łatwe rozszerzenie sieci i może być zasilany z portu USB.
- Zbuduj małą sieć lub dodaj porty do istniejącej sieci.
- Może być również zasilane przez port USB komputera, więc nie ma potrzeby znajdowania zapasowego gniazdka
- Cztery porty autoosensingowe 10-/100-/1000 Mbps
- Autonegotiating pół/pełny dupleks
- Auto-MDI/MDI-X Funkcja na wszystkich portach, więc nie ma potrzeby na kable krzyżowe
- Nie blokująca metoda przełączania sklepu
- Łatwe wskaźniki LED.
- Łatwa operacja plug-and-play.
- Gwarancja: 1 rok gwarancji Double Diamond ™ (standard)
Black Box LGB304A to kompaktowy przełącznik Gigabit Ethernet z czterema porty RJ45 10/100/1000 Mbps. Typowe aplikacje obejmują łączność LAN dla małych grup roboczych.
Przełącznik jest idealny dla zespołów mobilnych, takich jak audytorzy, które wymagają małego, przenośnego przełącznika w celu rozszerzenia liczby portów. Przełącznik może być zasilany z portu USB lub z dołączonego adaptera zasilania. Przełącznik zapewnia szybkość linii, przepustowość bez blokowania. Porty są autonegotiatingowe w połowie/pełny dupleks i zawierają wskaźniki LED do wyświetlania statusu portu. Ten niezarządzany przełącznik to plug and odtwarzanie i nie wymaga żadnej konfiguracji.
Szybkość filtrowania i przekazywania –
10 Mbps: 14 880 PP;
100 Mbps: 148 800 PP;
1000 Mbps: 1 488 000 PPS
Adresy MAC – 1k
Standardy – IEEE 802.3 10base-T, IEEE 802.3U 100base-TX, IEEE802.3AB 1000BASE-T, IEEE802.3x kontrola przepływu
Metoda przełączania –Store-and-forward
Złącza – (4) RJ-45, (1) moc
Wskaźniki –
LED: na jednostkę: (1) moc;
Port: (1) Link/Act, (1) 1000m
Moc – Z portu USB komputera przez kabel zasilający (włożony) lub 100-240 VAC, zewnętrzny zasilacz 50-60 Hz (w tym);
Wyjście: 5 VDC, 1.2 wzmacniacze, 6 watów max.
Rozmiar – 2H x 6.2W x 7.9d cm (0.8 “H x 2.4 “W x 3.1 “D)
Waga – 0.2 kg (0.4 funty.)