Resumo:
– Este artigo discute o desenvolvimento de uma técnica precoce de detecção de incêndio usando um sensor de infravermelho passivo (PIR) e redes neurais profundas (DNNs).
– Os sensores pir são sensíveis a movimentos corporais repentinos e emitem um sinal contínuo que variam no tempo.
– Dados experimentais são coletados usando um sensor PIR para detectar movimentos humanos e de incêndio.
– A transformação de wavelet é usada para extração de recursos dos sinais coletados.
– Os coeficientes de wavelet são convertidos em imagens de espectro RGB e usados como entradas para uma profunda rede neural convolucional.
– Várias arquiteturas DNN pré-treinadas são testadas, com a arquitetura Shufflenet produzindo a maior precisão de previsão de 87.8%.
– A estratégia em tempo real alcança 95.34% e 92.39% de precisão de detecção de incêndio e movimento humano, respectivamente.
Questões:
- Qual é o objetivo do artigo?
- Por que a detecção de incêndio precoce é importante?
- Que tipo de sensor é usado na técnica proposta?
- Como funciona um sensor pir?
- Qual é o papel da transformação de wavelet na técnica?
- Como os coeficientes de wavelet são usados na técnica?
- Qual a arquitetura da DNN produz a maior precisão de previsão?
- Quais são os níveis de precisão alcançados na estratégia em tempo real?
- Quais são as limitações dos sensores de fogo convencionais?
- Por que as técnicas de detecção de incêndio baseadas na visão nem sempre são eficazes?
- Que vantagens os sistemas de imagem infravermelha (IR) oferecem na detecção de incêndio?
- Quais são as desvantagens do uso de câmeras e computadores a bordo para detecção de incêndio?
- Qual o papel dos sensores PIR na detecção de chama?
- Que desafios estão associados à detecção de incêndio baseada em aprendizado profundo?
- Qual é a técnica proposta neste artigo para detecção de incêndio?
- Quais são as vantagens dos sensores PIR para detecção de incêndio?
O objetivo do artigo é apresentar uma nova técnica para detecção de incêndio precoce usando um sensor PIR e DNNs.
A detecção precoce de incêndio é importante para mitigar os danos relacionados ao fogo, impedir perdas humanas e de propriedade e reduzir o trauma físico e mental.
A técnica proposta usa um sensor de infravermelho passivo (PIR) para detecção de incêndio.
Um sensor PIR detecta a radiação infravermelha (IR) emitida por objetos. É sensível a movimentos repentinos do corpo e emite um sinal contínuo de variação no tempo.
A transformação de wavelet é usada para extração de recursos dos sinais coletados pelo sensor PIR.
Os coeficientes de wavelet são convertidos em imagens de espectro RGB, que servem como entradas para a profunda rede neural convolucional.
A arquitetura Shufflenet produz a maior precisão de previsão de 87.8%.
A estratégia em tempo real alcança 95.34% e 92.39% de precisão no fogo e na detecção de movimento humano, respectivamente.
Os sensores de incêndio convencionais têm área de cobertura limitada, não são eficientes em salas grandes e espaços abertos e são propensos a alarmes falsos devido a distúrbios externos.
As técnicas de detecção de incêndio baseadas na visão podem ser afetadas pela complexidade da propagação de incêndio e eventos interferentes em segundo plano e podem levantar preocupações com a privacidade.
Os sistemas de imagem IR são confiáveis e podem detectar incêndios em condições de luz visíveis ruins ou quando o fogo se mistura com o fundo. Eles podem atuar como vídeos de vigilância.
Câmeras e computadores a bordo representam barreiras de custo para soluções escaláveis e podem dar alarmes falsos devido à proximidade ou a outras interferências.
Os sensores PIR são versáteis para detecção de chama devido à sua capacidade de detectar mudanças abruptas na radiação de IR dos movimentos de objetos dentro de sua faixa de visualização.
Os desafios incluem a necessidade de um grande número de dados de treinamento, identificação de incêndios simultâneos, mudanças de iluminação e quantificação de chama de fogo e intensidade de fumaça.
A técnica proposta usa um sensor PIR diferencial e DNNs para detecção de incêndio em espaços fechados.
Os sensores PIR são sofisticados, de baixo custo e altamente capazes de detectar mudanças abruptas na radiação de infravermelho. Eles são versáteis e adequados para detectar a propagação de chama.
O que é pir
Wavelets são formas de onda assimétricas e irregulares que duram um curto período de tempo com um valor médio de zero. A análise de wavelet produz wavelets constituintes de diferentes escalas e posições da mãe wavelet [20]. Portanto, na transformação de wavelet contínua (CWT), o sinal de entrada é multiplicado por versões atrasadas e esticadas da wavelet escolhida e depois integradas ao longo do tempo da duração do sinal. Este processo gera coeficientes de wavelets C. O processo pode ser mostrado como:
Desenvolvimento de uma técnica precoce de detecção de incêndio usando um sensor infravermelho passivo e redes neurais profundas
A detecção precoce de incêndio é a chave para mitigar os danos relacionados ao fogo. Este artigo apresenta um método de sensor de infravermelho piro-elétrico (PIR) diferencial e redes neurais profundas (DNNs) para detectar incêndio em tempo real. Como o sensor PIR é sensível a movimentos corporais repentinos e emite um sinal contínuo que variam no tempo, são realizados experimentos para coletar movimentos humanos e de incêndio usando um sensor PIR. Esses sinais são processados usando a transformação de wavelet contínua unidimensional para executar a extração de recursos. Os coeficientes de wavelet correspondentes são convertidos em imagens de espectro RGB que são usadas como entradas para uma profunda rede neural convolucional. Várias arquiteturas de DNN pré-treinadas são adotadas para treinar e identificar os dados coletados para categorias de fundo (sem movimento), movimento humano e incêndio: pequenos incêndios quase-estáticos e espalhados. Resultados experimentais mostram que a arquitetura Shufflenet produz a maior precisão de previsão de 87.8%. Resultados experimentais para a estratégia em tempo real, que funciona a uma velocidade de 12 quadros por segundo show 95.34% e 92.39% dos níveis de precisão de detecção de fogo e movimento humano, respectivamente.
Trabalhando em um manuscrito?
1. Introdução
A detecção de incêndio precoce em edifícios residenciais ou industriais é muito importante para tomar ações apropriadas para evitar perdas humanas e de propriedade, trauma físico e mental. No entanto, os incêndios podem ser evitados ou controlados se identificados no estágio incipiente. Os incêndios acontecem devido a vários motivos, como negligência, mau funcionamento do dispositivo eletrônico, cozinha, fumo, vazamentos de líquidos inflamáveis e gases, incêndio criminoso, etc. Os estágios de um incêndio podem ser descritos como incipientes (ignição), crescimento, totalmente desenvolvido e decaimento [1]. O crescimento do incêndio e as taxas máximas de liberação de calor dependem principalmente dos recursos de design do edifício, incluindo revestimento inflamável e os tipos de combustíveis (cargas de incêndio), como decorações de interiores, móveis, etc. [2, 3]. De acordo com um dos padrões de comunicação de construção comum Bacnet, a segurança contra incêndio recebe a maior prioridade na automação de edifícios [4]. Com o aumento da complexidade nas operações de construção, é importante melhorar a sensibilidade e a precisão da detecção de incêndio [5].
Existem várias tecnologias de detecção de incêndio desenvolvidas para reduzir os acidentes de incêndio [1]. Os sensores pontuais comumente usados, como fumaça, calor e sensores de gás, têm recursos limitados [6]. Um incêndio tem que queimar por um tempo para alcançar o sensor e exceder o ponto limite definido para iniciar um alarme de aviso [7]. Isso dá muito espaço para um incêndio normal se espalhar rapidamente. Devido à área limitada de cobertura, os sensores convencionais não são eficientes em salas grandes e espaços abertos, como quintais, estacionamentos, florestas, etc. Além disso, sua precisão é afetada pelos distúrbios externos, como vapor, fumo, fumaça leve do cozimento, fazendo com que desencadeie alarmes falsos. De acordo com os serviços de incêndio e resgate (FRSS) na Inglaterra para o ano encerrado em dezembro de 2020, os falsos alarmes de incêndio chegam a 42% dos incidentes frequentados [8].
Para abordar questões em sensores de incêndio convencionais, os sistemas avançados de detecção de fumaça e incêndio usam técnicas de detecção de incêndio em vídeo para reconhecer incêndios em seus estágios iniciais [9]. Várias técnicas de análise de cores e aprendizado de máquina são usadas para extrair e identificar fogo em imagens e vídeos gravados. Embora as técnicas baseadas na visão sejam mais precisas e capture uma visão detalhada do ambiente, a complexidade no spread de incêndio e outros eventos interferentes em ambientes em ambientes práticos afetam sua capacidade de extração de recursos [10]. Também se observa que a fixação de câmeras nos locais de trabalho pode afetar o desempenho dos funcionários, criando um ambiente de questões de privacidade pessoal [11]. Os sistemas de imagem por infravermelho (IR) são eficazes para abordar questões como uma luz visível ou a mistura de imagem visível com o fundo [1]. Esses sistemas são altamente confiáveis e podem atuar como vídeos de vigilância para detectar incêndios. Embora tenham muitas vantagens, eles também têm certas desvantagens. Câmeras e computadores a bordo representam barreiras de custo para uma solução escalável. Eles dão alarmes falsos, dependendo da proximidade do sensor ou de qualquer outra interferência, como luzes da lâmpada, fluxo de ar quente, oficina ou atividades industriais, que afetam a sensibilidade [12]. Para abordar questões de perda de dados e distorção de dados na detecção de chama IR, um algoritmo robusto de fusão baseado na rede neural de função radial com o modelo Fuzzy Takagi -Sugeno é proposto em [13]. O processamento de imagens usando a tecnologia Deep Learning (DL) oferece desempenho significativamente alto na detecção de incêndio [14]. No entanto, existem desafios, como a necessidade de um grande número de dados de treinamento coletados em várias configurações e tipos de incêndio, identificação de incêndios simultâneos, alterações de iluminação e quantificação da chama de fogo e intensidade da fumaça [9].
Este artigo propõe uma nova técnica para detectar incêndios em espaços fechados usando um sensor PIR diferencial e DNNs. Sensores PIR detectam a radiação IR emitida por objetos. Eles são sofisticados, mas de baixo custo e altamente capazes de detectar quaisquer mudanças abruptas na radiação de IR dos movimentos de objetos dentro de sua faixa de visualização [15,16,17]. Portanto, os sensores pir são versáteis para detectar uma propagação de chama. Além disso, a detecção diferencial em sensores PIR é útil para evitar alarmes falsos causados por pequenas mas uniformes mudanças de infravermelho em sua faixa de visualização, como temperatura interna ou variações de luz solar. Isso se deve ao arranjo do sensor em que o sensor é dividido em duas metades e eles são conectados. A menos que não haja aumento suficiente na radiação de infravermelho para capturar uma metade, os sinais de saída produzidos a partir das duas metades se cancelam. Devido à faixa de visualização relativamente alta de 7 m (quando usada com lente Fresnel) em um ângulo que cobre 110 graus, é adequado para monitorar salas grandes com tetos altos [18]. Além disso, a abordagem do sensor PIR requer baixo poder de processamento em comparação com a visão computacional (vigilância) sistemas de detecção de fumaça ou incêndio [11]. Ao contrário das câmeras de segurança, os problemas de intrusão de privacidade humana não surgirão com sensores PIR, porque a saída do sensor é apenas um sinal digital ou analógico [19].
Diferentes tipos de spreads reais de incêndio e dados de movimento humano em um ambiente interno são coletados neste artigo usando um sensor PIR diferencial. Esses sinais são pré-processados usando a transformação de wavelet [20]. Os coeficientes de wavelet que correspondem aos recursos de incêndio extraídos são alimentados como insumos para treinar uma classe selecionada de DNNs para classificar eventos de incêndio e não-fogo I.e., categorias de incêndio e movimento humano, dentro da faixa de visualização do sensor PIR. Imagem pré-processamento aumenta a precisão da taxa de reconhecimento de chama nos DNNs [21, 22]. As abordagens convencionais de aprendizado de máquina precisam de uma quantidade considerável de conhecimento para extrair recursos, classificá -los e prever um spread de incêndio. Devido à capacidade complexa de extração de recursos de imagem e disponibilidade de CNNs pré-treinados como Alexnet, Resnet, Googlenet, etc., A abordagem DL pode ser usada para detectar chamas de fogo de forma robusta [10, 12, 14, 21, 23]. Além disso, variantes compactas de arquiteturas da CNN, como Nasnet-a-Mobile e Shufflenetv2, são usadas em [24] com camadas modificadas para melhorar a classificação de incêndio não-temporal e sem fogo. O método proposto em [24] mostra 95% de quadro completo e 94.Detecção de incêndio baseada em superpixel de 4%. Em nosso trabalho, os modelos CNN pré-treinados adotados também são modificados para melhorar a precisão ao custo do tempo de treinamento. A arquitetura de rede da CNN com a maior precisão de validação é usada para demonstrar a previsão de incêndio em tempo real.
Na seita. 2, a metodologia proposta é apresentada em categorização de eventos, aquisição de dados, processamento de sinais, estruturas de aprendizado profundo, arquitetura DNN e a estratégia de trabalho em tempo real. Os resultados da previsão de incêndio, juntamente com o desempenho em tempo real, são apresentados na seita. 3. Discussão e conclusão são dadas em seitas. 4 e 5.
2 Metodologia proposta
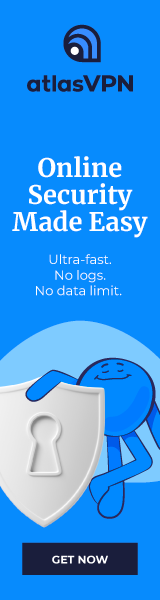
Neste trabalho, as mudanças na radiação de infravermelho para eventos de incêndio e incêndio são registradas usando um sensor de movimento PIR HC-SR501 [25]. A configuração experimental para coletar dados é mostrada em fig. 1. Todas as experiências são realizadas após diretrizes e regulamentos de saúde e segurança para experimentos de incêndio.
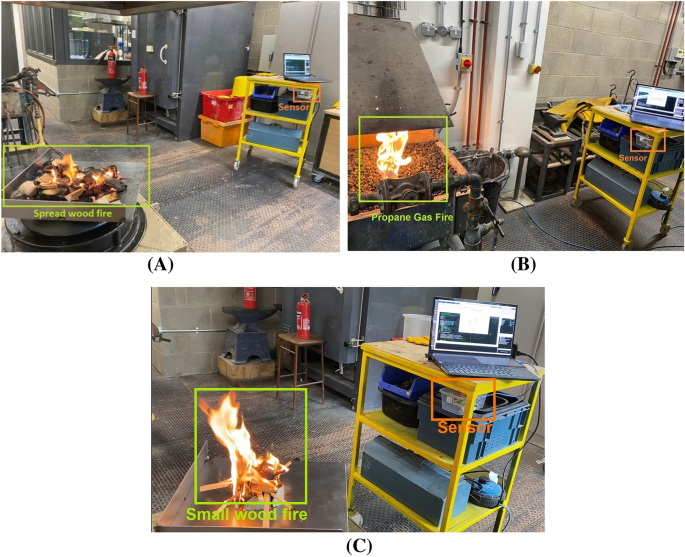
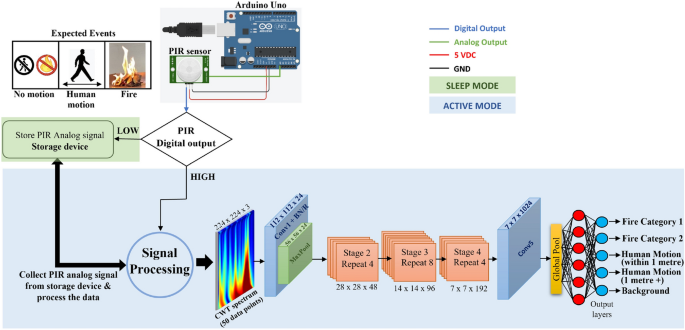
Na técnica proposta, o sensor PIR diferencial é configurado com um microcontrolador Arduino UNO (ATMEGA328P). Os dados do sensor PIR diferencial são um sinal analógico contínuo que variam no tempo. Sua amplitude é proporcional ao tamanho do corpo quente, velocidade do movimento e distância do sensor. O sinal é processado usando a transformação de wavelet. Os coeficientes de wavelet são convertidos em espectros RGB (vermelho-verde-azul-azul). Devido a esse processo de segmentação de cores no espaço RGB, as regiões de chama provavelmente podem ser identificadas e alimentadas como imagens de entrada compatíveis em DNNs pré-treinados para classificar os eventos que acontecem dentro da faixa de visualização do sensor. A Figura 2 representa a técnica de detecção de incêndio proposta.
O restante da seção explica as principais áreas deste trabalho em categorização de eventos, aquisição de dados, processamento de sinais digitais, pré-processamento de dados, arquitetura DNN e estratégia de desempenho em tempo real.
2.1 categorização de eventos
Como a técnica de detecção de incêndio proposta é destinada a configurações internas e o sensor PIR diferencial é sensível a movimentos, variáveis como distância do sensor, diferentes padrões de movimento humano e velocidades de movimento também são consideradas neste trabalho. Portanto, os dados do sensor PIR são coletados para os cinco eventos de movimento diferentes seguintes para registrar suas mudanças na radiação de infravermelho.
- 1. Antecedentes (sem movimento)
- 2. Movimento humano (dentro de 1 m do sensor)
- 3. Movimento humano (mais de 1 m do sensor)
- 4. Categoria de incêndio 1 (pequeno fogo de madeira)
- 5. Categoria de incêndio 2 (tanto espalhando incêndios a gás e propano)
Quando não há movimento na frente do sensor, ele é categorizado como o evento de fundo. Os movimentos humanos dentro de 1 me além contêm sinais de sensor para o movimento humano dentro dos intervalos 0.2 m a 1 me 1.1 m a 3 m, respectivamente. Como o sensor PIR é sensível ao movimento, as flutuações da tensão de saída são altas ou baixas para movimentos rápidos ou lentos, respectivamente. Assim, tanto o movimento de caminhada lento humano quanto os movimentos de caminhada rápida humana são registrados. Além disso, os movimentos humanos em uma cadeira giratória também são gravados. Finalmente, dois eventos da categoria de incêndio são gravados (veja fig. 1). A categoria de incêndio 1 tem a gravação de pequeno incêndio de madeira entre 0.5 me 3 m do sensor. A categoria de incêndio 2 consiste em incêndio maior ou incontrolável. Espalhando incêndios de madeira e propano a gás são registrados para este evento. A cobertura da área de madeira durante o evento de pequeno incêndio em madeira e fogo de madeira é 10 \ (>^\) –12 \ (>^\) e mais de 12 \ (>^\) respectivamente.
2.2 Aquisição de dados
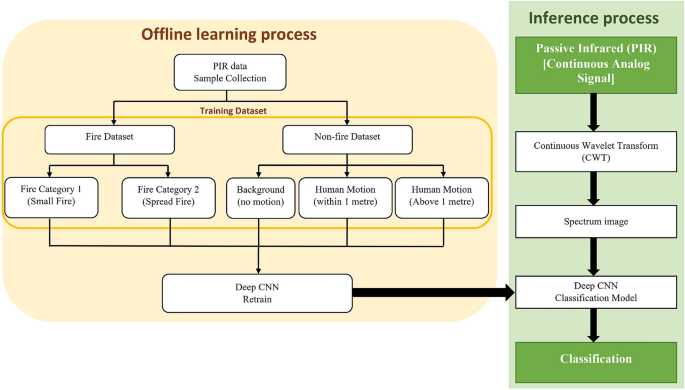
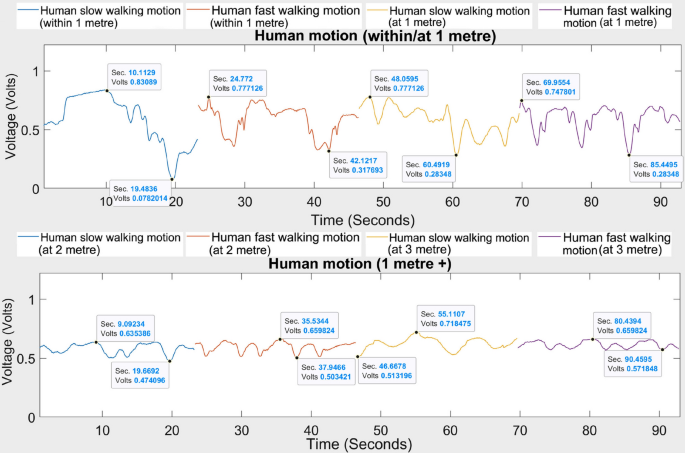
Os dois elementos de detecção piro-elétrica dentro do sensor PIR geram alterações diferenciais positivas ou negativas se um corpo quente entrar ou deixar a área de detecção do sensor, que é delimitada por dois slots no sensor. Portanto, o sensor produz sinais de tensão digital alta ou baixa, dependendo das variações nos níveis de radiação de infravermelho. Como a amplitude desses sinais é muito pequena, os sinais analógicos amplificados são extraídos do sensor PIR batendo diretamente de seu amplificador de circuito de sensor Chip Biss0001. Assim, os sinais analógicos amplificados são registrados durante os cinco eventos explicados na seita. 2.1. Os sinais de saída são mostrados nas Figs. 3 e 4.
Como o foco está no fogo, a frequência de tremores de chama deve ser considerada para amostragem de sinal. O comportamento da lama da chama é uma faixa de frequência de banda larga que cobre 1 Hz -13 Hz [17]. Considerando a regra de amostragem, a taxa de amostragem é selecionada como 50 Hz, o que é mais do que o dobro da frequência de tremores de chama. O sinal analógico do sensor PIR é transferido para Arduino Uno, que é transferido para o computador para processamento adicional de sinal. O Arduino UNO está configurado usando o MATLAB [26] para executar o processamento de sinal usando a rede DL treinada.
As Figuras 3 e 4 mostram que as amostras de sinais de PIR amplificados têm características diferentes para os eventos considerados no domínio do tempo. Durante o evento em segundo plano em que nenhum movimento ocorre, a amplitude do sinal varia de 0.58 V a 0.59 v. Essa faixa atua como a linha central em torno da qual o sinal flutua quando um movimento é detectado. Quando a intensidade do calor do infravermelho aumenta, a amplitude aumenta (acima ou abaixo da linha central). Como o PIR é sensível ao movimento de calor infravermelho, a flutuação da amplitude diminui quando a distância do evento aumenta e vice -versa. Pode ser visto a partir da figura. 3 Que as categorias de incêndio 1 (fogo de madeira pequena) e 2 (sinalizações de fogo de madeira e fogo de propano) têm tendências quase semelhantes com distâncias variadas. Por exemplo, os sinais de incêndio em madeira e propano de madeira por dentro e a 1 m têm variações de amplitude entre 0 V e 1.09 v. No entanto, quando a distância aumenta (a 2 e 3 m), suas amplitudes de sinal de incêndio estreitam -se até um intervalo entre 0.5 V e 0.8 v. Como o incêndio espalhado (categoria 2) ocupa um espaço mais amplo dentro da faixa de visualização do sensor, seu movimento é detectado melhor que o pequeno incêndio (categoria 1). Por exemplo, a 1 m de distância, a amplitude de sinal de fogo pequeno cai para um intervalo entre 0.35 V e 0.94 V, enquanto a amplitude do sinal de incêndio espalhada permanece entre 0 V e 0.96 v.
Por outro lado, os sinais de movimento humano dentro de 1 m mostram uma faixa de amplitude entre 0.08 V e 0.83 V (veja fig. 4). Semelhante aos sinais de incêndio, esse alcance diminui ainda mais com a distância. Observa. Além disso, pode -se observar que o movimento humano e o fogo além de 2 m têm faixas de amplitude semelhantes. Isso torna desafiador diferenciar atividades humanas diárias de um incêndio usando categorização de eventos baseada em amplitude.
2.3 Processamento de sinal
O processamento de sinal se concentra na análise, modificação e sintetização de um sinal com base nos requisitos do usuário [27]. Devido à natureza dinâmica dos níveis de radiação da chama de fogo, os sinais de incêndio não são estacionários. Técnicas de processamento de sinal amplamente usadas, como a transformação de Fourier, assume que o sinal processado é estacionário. Portanto, neste trabalho, os sinais do sensor PIR são analisados usando wavelets. Ao contrário da transformação de Fourier, a análise wavelet ajuda a construir uma relação de frequência de tempo usando domínios de tempo e frequência [28]. As wavelets também têm filtros embutidos que eliminam ruídos do sinal e têm menos custo computacional do que a transformação de Fourier.
Wavelets são formas de onda assimétricas e irregulares que duram um curto período de tempo com um valor médio de zero. A análise de wavelet produz wavelets constituintes de diferentes escalas e posições da mãe wavelet [20]. Portanto, na transformação de wavelet contínua (CWT), o sinal de entrada é multiplicado por versões atrasadas e esticadas da wavelet escolhida e depois integradas ao longo do tempo da duração do sinal. Este processo gera coeficientes de wavelets C. O processo pode ser mostrado como:
$$ \ Comece
onde \ (f (t) \) é o sinal original (o sinal PIR neste caso) no domínio do tempo e \ (\ psi (t) \) é a função da mamãe wavelet. Existem diferentes tipos de funções de mamãe wavelet, como Haar, Daubechies, Coiflets, Symlets, Biorthogonal, etc. A mãe wavelet precisa ser selecionada adequadamente para combinar com os picos transitórios do sinal de sensor PIR original. Então, melhores cancelamentos de ruído sem distorções podem ser alcançados [28]. Os coeficientes de wavelet c indicam quão intimamente a wavelet escolhida está correlacionada entre as seções do sinal original.
Neste artigo, a wavelet Morse [29] na caixa de ferramentas Matlab wavelet [30] é usada. A saída analógica amplificada do sensor PIR é afetada por ruído e desvio do sinal devido a variações de temperatura atmosférica. O banco de filtro CWT é usado para filtrar esse ruído e produzir o sinal em relação às frequências. Em geral, a frequência de oscilação do sinal PIR para uma chama tremeluzente é maior que a dos sinais pir de um objeto em movimento [17]. Vários parâmetros do Banco de Filtro são alterados para visualizar recursos distintos para cada evento.
2.4 estruturas de aprendizado profundo
As estruturas DL fornecem blocos de construção para projetar e treinar redes neurais profundas usando seus algoritmos, modelos pré-treinados e aplicações, bem como a visualização do progresso do treinamento do modelo. Estruturas DL amplamente usadas são Tensorflow, Keras, Pytorch, Theano, Caffe, etc. Neste artigo, a caixa de ferramentas DL no MATLAB é usada [31].
2.5 dados de pré-processamento e construção de dados de dados
Como a estrutura de dados de entrada para DNN deve estar em formato de imagem (matriz 3D), o pré-processamento de dados é realizado. Os dados coletados do sensor PIR estão em um formato de série temporal contínua (consulte as figuras. 3, 4) que é então segmentado em comprimentos de 50 pontos de dados em etapas de 5 para treinar o DNN. Esses 50 pontos de dados são atribuídos como conjuntos de dados que são processados através do CWT.
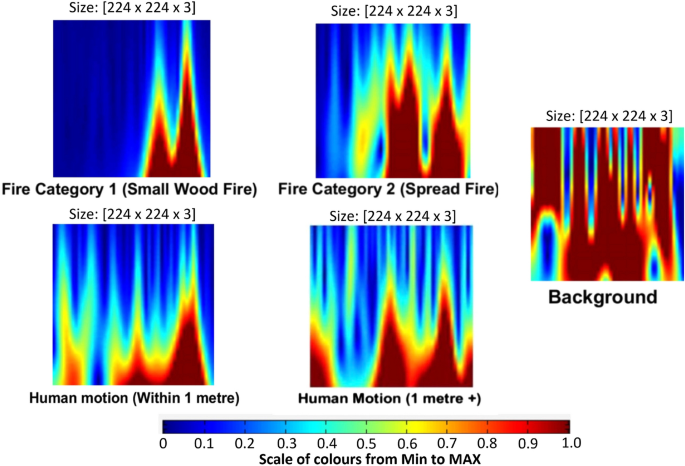
Em seguida, o tamanho da matriz 2D resultante com coeficientes absolutos é \ (61 \ Times 50 \), no qual cada linha e coluna corresponde a uma escala e um ponto de dados, respectivamente. Esses coeficientes absolutos são escalonados e convertidos em um espectro de tamanho \ (61 \ Times 50 \ Times 3 \) (\ (\ text \ times \ text \ times \ text \))). A arquitetura DNN selecionada (consulte a Tabela 4) requer uma matriz de tamanho \ (224 \ Times 224 \ Times 3 \) como os dados de entrada. Assim, os escalogramas do CWT são transformados em formato de imagem RGB e são redimensionados conforme necessário usando técnicas de aumento de dados.
A Figura 5 mostra exemplos de formato de imagem RGB dos escalogramas em relação aos cinco eventos gerados pela CWT. A partir da matriz \ (224 \ Times 224 \ Times 3 \) (tamanho da imagem do espectro), o DNN extrai os recursos distintos de cada classe/evento e aprende a reconhecer o evento que acontece na frente do sensor. Para evitar problemas de excesso de ajuste, o mesmo número de dados deve ser fornecido durante o progresso do treinamento. Assim, cada classe/evento (consulte a seita. 2.1) Consiste em 5915 espectros de RGB para treinamento, 2535 para validação e 1690 para testes.
2.6 Arquitetura DNN
A CNN é o algoritmo DL mais estabelecido para processar padrões de dados, extrair e classificar recursos [32]. A arquitetura DNN tem três camadas principais: convolução, agrupamento e totalmente conectado. A camada convolucional desempenha um papel importante nos DNNs. Para executar a extração de recursos, a convolução requer um kernel ou filtro de tamanho específico para deslizar sobre a imagem de entrada com base no passo dado. O passo que é a distância entre dois grãos consecutivos determina as colunas nas quais o filtro deve se mover na imagem de entrada. Durante o processo, a multiplicação da matriz no elemento é alcançada em todos os locais entre o kernel e a entrada para extrair o mapa de recursos da imagem. Da mesma forma, vários kernels agem como diferentes extratores de características. Durante o processo de treinamento, os melhores kernels nas camadas de convolução e pesos nas camadas totalmente conectadas são identificadas para o conjunto de dados de treinamento. A camada convolucional se mostra eficaz porque as camadas mais próximas da entrada aprendem recursos de baixo nível, como linhas, curvas, etc. E à medida que as camadas se aprofundam, a rede aprende recursos de alto nível, como formas, objetos específicos, etc. Neste trabalho, MobileNet-V2, Shufflenet, VGG-16, Googlenet e DNNs projetados personalizados são escolhidos para treinar dados (consulte a Tabela 1).
2.7 Estratégia de trabalho em tempo real
O diagrama esquemático da estratégia de trabalho em tempo real é mostrado em fig. 6. Os dois estágios são explicados abaixo.
2.7.1 modo de suspensão
Quando nenhum movimento é detectado, é conhecido como estado normal ou modo de suspensão. A saída digital do sensor pir atua como um gatilho. No estado normal, a saída digital do PIR será baixa, que desligará a unidade de processamento de sinal e o DNN. Enquanto isso, a saída analógica do sensor PIR é armazenada no dispositivo de armazenamento.
2.7.2 modo ativo
Quando uma moção é detectada, a saída digital do PIR será alta. Isso inicia o gatilho que liga a unidade de processamento de sinal e o DNN para classificar o evento que está acontecendo dentro da faixa de visualização do sensor. O sistema funciona até a DNN classificar o plano de fundo (sem movimento). Em seguida, ele remonta ao modo de suspensão (desligando a unidade de processamento de sinal e o modelo DNN).
Assim, o algoritmo funciona quando uma moção é detectada. Isso torna o modelo com eficiência energética resistindo à unidade de processamento de sinal e ao modelo CNN profundo no estado normal. Durante o modo ativo, os últimos 50 pontos de dados são processados pela unidade de processamento de sinal e pela rede DL para classificar o evento. Como resultado, toda a estratégia de trabalho em tempo real é semelhante a um fluxo de vídeo que atualiza toda vez que um novo ponto de dados é coletado do sensor PIR. A taxa de atualização é discutida na seita. 3.3.
3 resultados experimentais
Esta seção descreve os resultados de treinamento e validação da CNN. Então a observação de desempenho em tempo real é apresentada para os cinco eventos selecionados neste trabalho.
3.1 Resultados do treinamento
Todos os DNNs listados na Tabela 1 são treinados usando os dados experimentais para os cinco eventos coletados em um ambiente controlado (ver FIG. 1). Os resultados de treinamento correspondentes são apresentados na Tabela 3. Quando o googlenet com a camada de abandono padrão é usado, a precisão da validação é 79.91%, enquanto o googlenet sem qualquer camada de abandono fornece uma precisão de validação de 78.1%. No entanto, a adição de mais camadas de abandono (consulte a Tabela 2) reduz gradualmente a precisão do modelo Googlenet, como mostrado na Tabela 3. Uma camada de normalização em lote (BN) é adicionada à arquitetura googlenet para melhorar a velocidade de treinamento e o desempenho. Seguindo as diretrizes de [34], a camada BN é adicionada dentro dos últimos 4 módulos iniciantes de 9 módulos empilhados linearmente na arquitetura Googlenet [35]. No entanto, quando a camada de abandono do googlenet é removida, a precisão é 76.25%, o que é menos preciso do que usar o googlenet padrão.
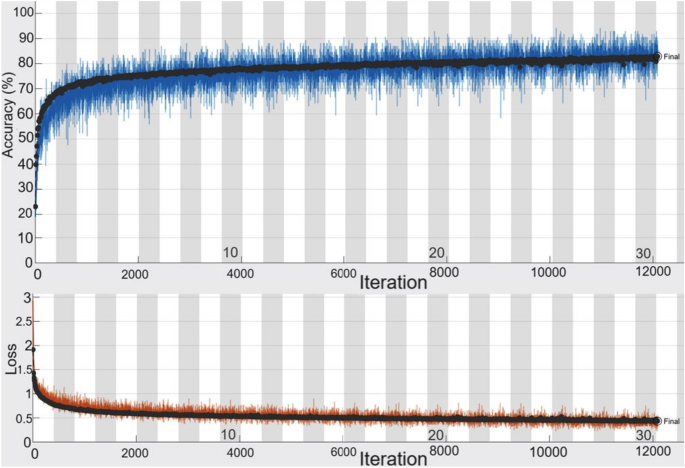
A Tabela 3 mostra que o shufflenet com pesos pré-treinados dá 83.Precisão de validação de 6%. Como possui um número menor de camadas e parâmetros (consulte a Tabela 1), seu custo computacional também é baixo. Assim, o shufflenet-v2 é escolhido como o modelo DNN para este trabalho e a arquitetura é ilustrada na Tabela 4. Aqui, as entradas da arquitetura DNN são os coeficientes de wavelet dos sinais de sensor PIR convertidos em espectros RGB. Quando a arquitetura Shufflenet-V2 é treinada usando dados do sensor PIR de 1 canal, a precisão da validação cai para 80.86% em comparação com 83.6% usando espectros RGB. O progresso do treinamento do shufflenet-v2 é mostrado em fig. 7.
3.2 resultados de teste
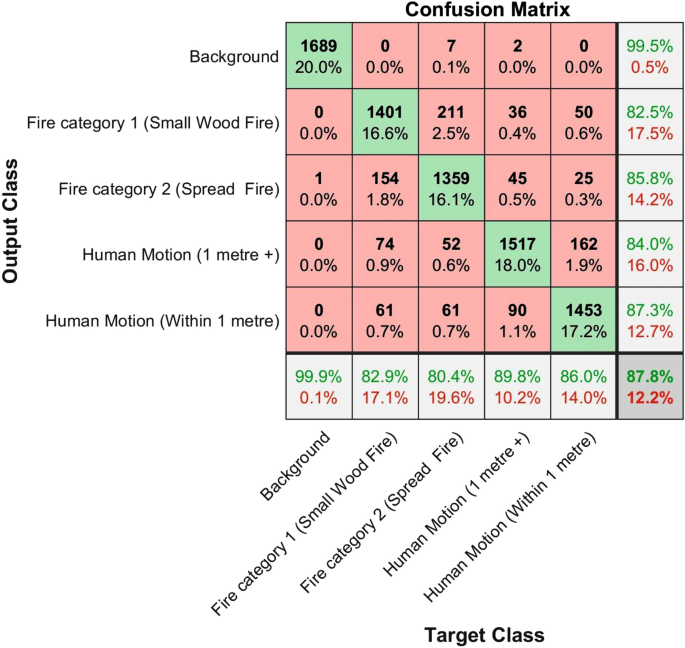
A Figura 8 mostra que os verdadeiros positivos (previsões) são maiores que as previsões falsas. Cada evento tem 1690 imagens, nas quais o fundo tem os mais altos positivos de 99.9%. Previsões de movimento humano alcançaram 86% de precisão dentro de 1 me 89.8% para mais de 1 m. A categoria 1 de incêndio e a categoria de incêndio 2 pontuam uma precisão de 82.9% e 80.4%, respectivamente. Como ambas as categorias de incêndio têm recursos semelhantes, como o comprimento da chama, o ângulo de inclinação da chama, etc. Em alguns casos, existem falsos positivos para as duas categorias de incêndio. Taxa de falsa positiva para a categoria de incêndio 1 é 2.5%, enquanto o de categoria 2 de incêndio é 1.8%. Previsões semelhantes também ocorrem em eventos de movimento humano. No entanto, previsões falsas ocorrem apenas nos eventos principais da categoria: movimentos de incêndio e humano. No geral, a taxa de precisão de previsão verdadeira e falsa previsão são 87.8% e 12.2% respectivamente. Quando um sistema de contador é introduzido, a detecção final de incêndio é 95.34% e a detecção de movimento humano é 92.39% conforme indicado na Tabela 6. Nesse sistema, um alarme é acionado apenas quando um incêndio é previsto mais de três vezes, sem oscilações ao movimento humano ou fundo.
3.3 observação de desempenho em tempo real
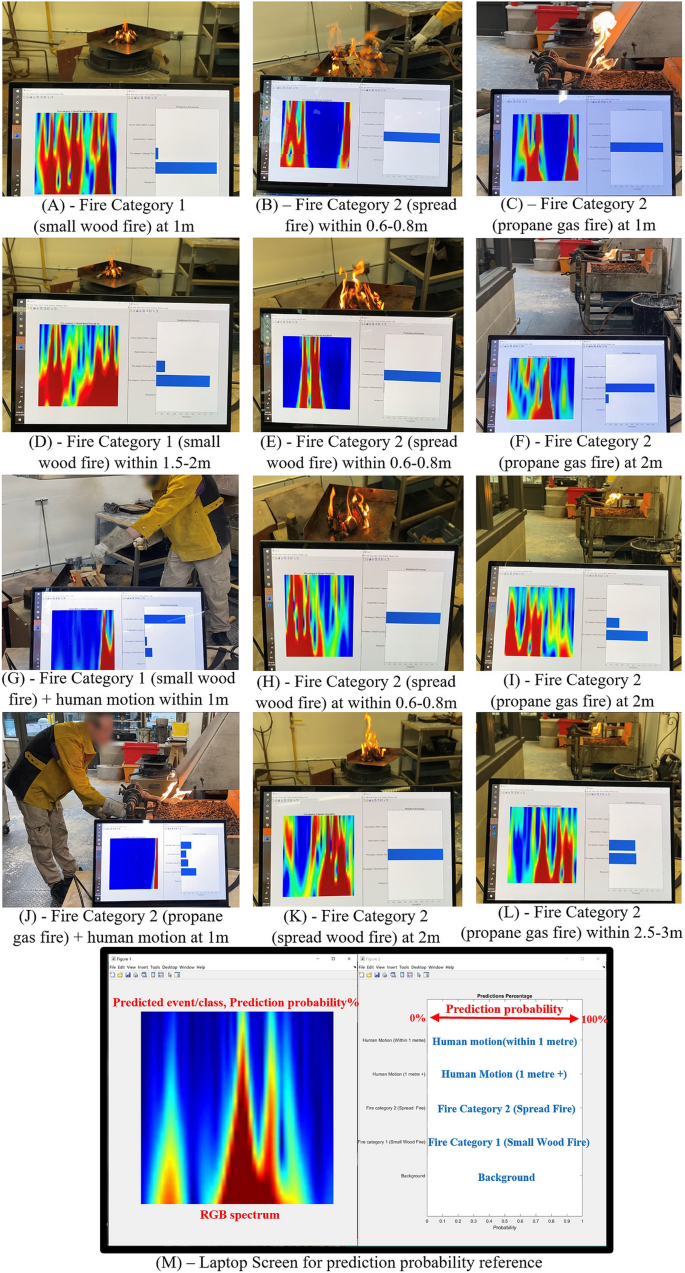
A avaliação de desempenho em tempo real é realizada no Intel Core i9-9980HK 2.CPU de 4GHz com 32 GB de RAM e NVIDIA GeForce RTX 2060. O desempenho em tempo real é realizado na velocidade de 12 quadros por segundo. Observações para os eventos de incêndio em tempo real selecionados são discutidos abaixo. Algumas amostras de previsões de modelo capturadas durante o desempenho em tempo real são mostradas em fig. 9. A chave para indicar probabilidades de previsão é dada em fig. 9 (m).
3.3.1. Fundo
Como mostrado em fig. 8, o desempenho em tempo real da previsão de fundo é quase 100% de previsão positiva verdadeira.
3.3.2 movimento humano (dentro e além de 1 m)
Movimentos de caminhada lenta e rápida humana, e a giro humana em uma cadeira giratória são observadas nesta categoria.
- Dentro de 1 m: O verdadeiro positivo é maior que o falso positivo. Em caso de eventos mistos (veja fig. 9g) Com o pequeno fogo de madeira e o movimento humano (dentro de 1 m), o modelo previu 81.8% como movimento humano (dentro de 1 m) e categoria 1 de incêndio como 16%.
- De 1 m – 3 m: Nesta ocasião, a probabilidade de verdadeiros positivos é quase 87%. Previsões falsas ocorrem entre previsões verdadeiras dentro das 12 previsões por segundo. A maioria das previsões falsas é o movimento humano (dentro de 1 m).
3.3.3 categoria de incêndio 1 (pequeno fogo de madeira)
- Dentro/a 1 m: O algoritmo produz altas previsões verdadeiras de quase 95% (ver fig. 9a). No entanto, uma pequena porcentagem (1.8%) é classificado incorretamente para o fogo categoria 2 se o pequeno incêndio de madeira se mover mais rapidamente devido ao vento.
- De 1 m – 2 m: Prevê altos positivos verdadeiros (86%) com menos falsos positivos (14%), como mostrado em fig. 9d. Durante o evento, 0.9% das previsões oscilam ao movimento humano (1 m+) entre as verdadeiras previsões positivas.
- De 2 m – 3 m: Dentro de 2 m – 3 m de distância do fogo, altos falsos positivos são observados principalmente devido ao movimento humano (1 m+).
3.3.4 categoria de incêndio 2 (espalhando fogo)
- Dentro/a 1 m:. 9b, c, e, h). O modelo também tem um bom desempenho em eventos mistos de incêndio em gás de propano (categoria 2) e movimento humano (a 1 m), como mostrado em fig. 9J. Como o incêndio de gás de propano é menor nesse caso, o modelo prevê a categoria 1 de incêndio, o movimento humano (dentro de 1 m) e a categoria 2 de incêndio como 37%, 25%e 18%, respectivamente, respectivamente.
- De 1 m – 2 m:. 9f, i, k).
- De 2 m – 3 m: Durante o incêndio em madeira, altas previsões positivas verdadeiras são observadas. No entanto, altas oscilações de previsões falsas são observadas durante o incêndio de propano. Devido à visão distante (veja fig. 9L), o incêndio de gás de propano é previsto como quase 50% para as categorias de incêndio 1 e 2. Há uma chance de 50% de prever um incêndio espalhado por gás de propano como um pequeno incêndio a uma distância de 2 m – 3 m.
4. Discussão
Neste artigo, os experimentos são realizados usando um sensor PIR para coletar dados humanos, incêndios e de fundo para treinar DNNs e, em seguida, a detecção de incêndio é testada em tempo real em tempo real. Desde então, o Shufflenet-V2 produz a maior precisão de validação de 87.8% na velocidade de 12 quadros por segundo, é usado junto com o sensor PIR para realizar experimentos de detecção de incêndio em tempo real. A detecção de incêndio baseada em sensores PIR é quase equivalente no desempenho a um sistema de detecção de incêndio baseado em vídeo. No entanto, sistemas baseados em vídeo são relativamente mais caros. Ao contrário dos sistemas de detecção de incêndio baseados em visão, os sensores PIR podem detectar incêndio usando sinais unidimensionais com menor custo computacional. Além disso, a estratégia de trabalho em tempo real é modificada para reduzir alarmes falsos e, portanto, usar o poder computacional de maneira eficaz. Conforme discutido na seita. 3.3, as previsões em tempo real podem flutuar dentro das 12 previsões por segundo período. Portanto, um contador é construído para iniciar um alarme se um incêndio for previsto em mais de 3 previsões, i i.e., para 0.25 s, sem oscilações ao movimento humano ou fundo. Este sistema de contador reduz efetivamente a taxa de alarme falso, como mostrado na Tabela 5.
Tabela 5 Porcentagens de detecção de eventos do modelo proposto com o Sistema de Contador Ativado
Tabela 6 Comparação dos resultados do método proposto (após ativar o Sistema de Contador) e outros modelos semelhantes
Na literatura, os sensores PIR são usados principalmente para detectar movimentos de fogo/chama ou humano [17, 37, 38]. Em nossa metodologia proposta, um sensor PIR é usado para prever o fogo e o movimento humano em tempo real ao acontecer dentro da faixa de visualização do sensor. A Tabela 6 ilustra algumas previsões de detecção de fogo e movimento humano encontradas na literatura em comparação com as previsões do modelo proposto. O modelo proposto mostra resultados promissores na detecção de fogo e movimento humano. Os modelos referenciados destinados a detectar padrões de movimento ou movimento humano; não ambos. De acordo com [17, 37], os eventos são categorizados apenas como eventos de incêndio e incêndio, nos quais os autores consideram o papel e o álcool como a categoria de incêndio. O trabalho em [38] concentra apenas a detecção de eventos de movimento humano. Em nosso método proposto, a intenção é detectar a propagação de fogo usando duas fontes de incêndio diferentes e padrões de movimento humano. Além disso, o modelo proposto é capaz de diferenciar o fogo como fogo pequeno ou espalhado em 2 m (ver fig. 9).
A Tabela 5 ilustra o fundo (sem movimento), as taxas de detecção de incêndio e humano como 99.71%, 95.34% e 92.39%, respectivamente. Como mostrado em fig. 9, nosso método proposto testa categorias de fogo e movimento humano: pequeno e espalhando fogo e movimento humano dentro de 1 m e mais de 1 m do sensor pir. As figuras 3 e 4 mostram que o pequeno fogo de madeira a 3 m é semelhante a um movimento humano a uma distância superior a 1 m; especificamente a 3 m. Isso mostra que diferentes padrões de movimento humano resultam em diferentes padrões de dados PIR que são semelhantes aos padrões de incêndio em algumas instâncias. Conforme observado na Tabela 5, esse problema é abordado em nosso modelo usando o sistema de contador para parar de confirmar qualquer previsão de incêndio falsa ou detecção.
O DNN é treinado com dados limitados para o movimento humano, porque o movimento humano tem vários padrões de movimento. O sensor PIR produz diferentes dados de saída para diferentes movimentos/ações humanas. Por exemplo, o movimento de caminhada humano é diferente do movimento de corrida humano; A mão humana acenando acima da cabeça é diferente dos movimentos de dança humana. Portanto, enfatiza -se que o DNN é treinado com dados limitados da caminhada lenta humana, caminhada rápida e girando na cadeira giratória. Assim, durante a previsão em tempo real, se um humano faz alguns movimentos irregulares (excluindo os eventos treinados de movimento humano) como dançar na frente do sensor, há uma possibilidade maior de prever como fogo. Porém, uma previsão positiva alta e alta é obtida ao testar com três padrões simples de movimento humano mencionados acima.
A precisão e a robustez do algoritmo podem ser melhoradas treinando -o com diferentes padrões de movimento humano e categorias de incêndio. Além disso, este trabalho pode ser estendido para usar redes DL alternativas, como as variações de memória de curto prazo (LSTM), conforme apresentado em [5, 39] para melhorar a confiabilidade da detecção de incêndio.
Neste estudo, o sensor PIR não experimentou oclusões. A literatura sobre reconhecimento visual de objetos com oclusões usa treinamento extensivo de DNNs com imagens rotuladas de objetos com oclusões [40]. Uma abordagem semelhante pode ser usada para categorização de incêndio com oclusões. A precisão pode ser aumentada ainda mais usando sensores adicionais, como sensores de fumaça.
Em edifícios avançados de alta tecnologia, os sensores de movimento são usados como interruptores de luz automáticos para ligar/desligar para reduzir o consumo de energia. Nossos resultados de detecção de movimento e movimento humano indicam que a técnica proposta pode ser estendida para incorporar esses sistemas de comutação liga/desliga para atender a vários propósitos, como incêndio e detecção de ação humana. A detecção humana também pode funcionar como um alarme de roubo que pode ser ativado quando o usuário está fora do escritório ou edifício residencial.
5. Conclusão
Neste artigo, um algoritmo de detecção de incêndio baseado em um sensor PIR diferencial e DNNs é proposto. As experiências são realizadas usando um sensor PIR para coletar movimentos humanos, fogo pequeno e espalhado de madeira e dados de fundo que são usados para treinar DNNs. Resultados de treinamento comparativo com várias arquiteturas DNN são apresentadas. Desde então, o Shufflenet-V2 produz a maior precisão de validação de 87.8% na velocidade de 12 quadros por segundo, é usado para realizar a detecção de incêndio em tempo real com o sensor PIR. O sistema prevê duas categorias de incêndio e três padrões de movimento humano com sucesso durante experimentos em tempo real. As taxas de detecção para antecedentes (sem movimento), tipos de incêndio e movimentos humanos são 99.71%, 95.34%e 92.39%, respectivamente. Além disso, ativar a técnica do contador no sistema reduz a taxa de alarme falso em 65.66%. A previsão falsa geral é 12.2% antes da técnica do balcão e cai para 4.19% após a técnica do contador. Este estudo indica que o sistema proposto pode ser usado para diferenciar variedades de tipos de incêndio e padrões de movimento humano se suficientemente treinados.
6 Informações suplementares
Um vídeo mostrando os experimentos conduzidos para coletar dados de incêndio e para previsões de incêndio em tempo real é enviado junto com o manuscrito.
O que é pir?
PIR significa infra vermelho passivo. Um sensor infravermelho passivo é um sensor eletrônico que mede a luz infravermelha (IR) irradiando de objetos em seu campo de visão. Os sensores PIR são mais frequentemente usados em detectores de movimento baseados em PIR.
Um detector de movimento baseado em PIR é usado para sentir o movimento de pessoas, animais ou outros objetos. Eles são comumente usados em Alarmes de roubo e em sistemas de iluminação automaticamente ativados. Eles são comumente chamados simplesmente “Pir”, ou às vezes “PID”, para “detector de infravermelho passivo”.

Como os sensores pir funcionam?
Um sensor infra -vermelho passivo detecta a luz infravermelha irradiada por um objeto quente.
Todos os objetos com uma temperatura acima do zero absoluto emitem energia térmica na forma de radiação. Geralmente esta radiação não é’T visível ao olho humano porque irradia em comprimentos de onda infravermelho, mas pode ser detectado por dispositivos eletrônicos projetados para esse propósito.
Sensor de movimento PIR

Um sensor PIR detecta fontes de calor em movimento. A lente (Fresnel) consiste em várias partes; Uma vez que a imagem térmica (radiação infravermelha) muda, o detector responde. Pessoas e animais grandes são notados; pequenos animais como insetos e aranhas não são.
O termo passivo neste caso refere -se ao fato de que os dispositivos infravermelhos passivos não geram ou irradiam energia para fins de detecção. Eles funcionam inteiramente detectando a radiação infravermelha emitida ou refletida de objetos. Eles não detectam ou medem “aquecer”.
Como reduzir alarmes falsos
Como afirmado anteriormente, qualquer “Fonte de calor em movimento” Pode desencadear um alarme. Isso significa que rascunhos, áreas ventosas e luz solar direta são fontes de calor para evitar. Relatórios incorretos também são produzidos pelo brilho como reflexão sobre couro preto. Se ocorrer um alarme falso, o sistema de alarme’s Posição ou sensibilidade do sensor devem ser ajustados.
Muitos produtos Mobeye incluem um sensor infra -vermelho passivo ou podem ser usados combinados com um sensor infravermelho passivo como acessório. Porque tem um detector duplo para verificação, o Alarme ao ar livre Mobeye Detector, por exemplo, filtra a maioria dessas fontes. Isso funciona particularmente bem em condições de vento. O CMVXI-R é construído no Optex’s PIR externo líder de mercado, que é líder mundial em tecnologia PIR.
A unidade possui dois padrões de detecção, os quais devem ser quebrados simultaneamente para acionar o alarme. Isso resulta no detector altamente imune a alarmes falsos criados por pássaros, gatos, cães etc. Como esses animais não acionam os detectores superior e inferior ao mesmo tempo.
Detecção de dupla camada digital
Os dois sensores PIR internos analisam independentemente a detecção para que uma coincidência enganosa de eventos possa ser filtrada. Essa tecnologia praticamente elimina detecções de animais menores nas instalações. O modelo VXI-R está equipado com uma lógica de reconhecimento de sinal aprimorada digitalmente chamada SMDA. O SMDA melhora a imunidade contra vários fatores de ruído, como mudanças climáticas e mudanças de vegetação.
Tudo que você precisa saber sobre sensores de movimento
Um sensor de movimento (ou detector de movimento) é o principal jogador do seu sistema de segurança porque ele’é o principal dispositivo que detecta quando alguém está em sua casa quando não deve’T. Um sensor de movimento usa uma ou numerosas tecnologias para perceber o movimento em uma área. Se um sensor for disparado, um sinal de aviso será enviado ao seu sistema de segurança’S Console, que se conecta ao seu dispositivo de monitoramento alertando você e o dispositivo de monitoramento para uma possível ameaça em sua residência.
O papel dos sensores de movimento em sua segurança doméstica
O principal ponto de detecção de movimento é sentir um ladrão e enviar um sinal de aviso para o seu painel de controle, que alerta seu dispositivo de monitoramento. Os sensores funcionam quando você não está em casa, ou quando você diz ao sistema que não está em casa. Alguns sistemas de segurança podem ser configurados para gravar eventos por meio de uma câmera de segurança quando a atividade é detectada.
Sensores de movimento ficam de guarda, preparados para reagir a uma variedade de situações, como movimento em sua sala de estar, janelas ou portas sendo abertas ou fechadas, ou uma janela quebrada.
Sensores de movimento podem:

- Alerta você na ocorrência de que seu filho/filha quebra o toque de recolher
- Tire uma campainha quando alguém se aproxima da porta da frente
- Alertá -lo quando as crianças entram em áreas classificadas em casa, como adega, sala de exercícios ou armários de medicação
- Salvar energia usando iluminação do sensor de movimento em espaços vazios
- Informá -lo se os animais de estimação entrarem em áreas onde eles’não deveria
Tipos de sensores de movimento
Infravermelho passivo (PIR)
Detecta calor corporal (energia infravermelha). Os sensores de infravermelho passivo são os mais utilizados movimento em sistemas de segurança doméstica. Quando seu sistema é preparado, seus sensores de movimento são ativados. Uma vez que o sensor aqueça, pode sentir calor e movimento nas áreas imediatas, criando um defensivo “grade.” Se um objeto em movimento bloquear muitas zonas de grade e os níveis de energia infravermelha mudar rapidamente, os sensores são acionados.
Microondas (MW)
Envia pulsos de microondas e mede o sinal de um objeto em movimento. Eles cobrem uma grande área comparada aos sensores infravermelhos, mas são suscetíveis a intrusões elétricas e são mais caras.

Sensores de movimento de tecnologia dupla
Sensores de movimento podem ter recursos compartilhados em um esforço para diminuir os alarmes falsos. Por exemplo, um sensor de infravermelho passivo (PIR) pode ser compartilhado com um sensor de microondas. Como cada um opera em várias áreas da escala, e uma é inativa e uma é ativa, os sensores de movimento de tecnologia dupla não são tão prováveis quanto outros tipos de raciocinar alarmes falsos, para que os alarmes reajam. Os sensores devem ser acionados. Por outro lado, isso não significa que eles, sem motivo, causam alarmes falsos.
Tipo reflexivo de área
Emite raios infravermelhos de um LED. Usando o sinal desses raios, o sensor mede a distância ao indivíduo ou objeto e detecta se o objeto estiver dentro da área selecionada.
Ultrassônico
Mede o reflexo de um objeto em movimento e envia pulsos de ondas ultrassônicas.
Vibração
Estes podem ser comprados ou sem problemas em casa. Detecta tremendo. Um sensor de vibração caseiro usa pouca massa em uma alavanca, que é ativada por um botão a um alarme quando vibra. Sensores de movimento caseiros são capazes de trabalhar, mas também podem ser imprevisíveis.
Outras características do sensor de movimento
Sensores de movimento sem fio
Atualmente, a maioria dos sensores de movimento é sem fio. Os sensores sem fio são muito simples de configurar. Eles não precisam de perfuração e comunicam com o outro mecanismo do sistema de segurança sem fio.
Sensores de movimento de contato (porta/janela)
Muitos sensores de movimento de contato são sensores de infravermelho reativo. Eles dispararam um alarme se a porta ou janela protegida for aberta enquanto o sistema estiver equipado.
Sensores de movimento imune para animais de estimação
Um sensor infravermelho passivo pode ser configurado para não prestar atenção aos animais até um peso definido. Um sensor de movimento de tecnologia dupla é mais desafiador com alarmes falsos causados por animais, pois precisa de dois sensores para ser acionado de uma maneira determinada pela empresa.
Eles podem ser configurados para desconsiderar um animal grande ou numerosos animais pequenos sem desencadear um alarme falso. Alguns sensores de movimento resistentes a animais de estimação têm um nível de sensibilidade que pode ser sintonizado para famílias com animais muito ativos.
Sensores de movimento de vídeo
Links câmeras de vídeo com processamento avançado de sinal. Alguns sensores de movimento graváveis desencadeiam gravação quando sentem movimento. As câmeras controladas por sensores de movimento podem economizar seu armazenamento de memória, não gravando milhares de horas de imagens inúteis – eles apenas capturam as informações significativas.
Melhores práticas para sensores de montagem
Se você deseja um sistema que precise de instalação especializada, o instalador saberá configurar seus sensores. Por outro lado, você é responsável por configurar seus sensores se for com um sistema de segurança doméstico DIY. Antes de instalar sensores de movimento, leia as instruções de configuração, pois elas provavelmente consistirão em recomendações de posição. Alguns sistemas de bricolage também fornecem instruções eletrônicas ou você ligou para um representante de vendas que o levará pelo procedimento de configuração.

Lembre-se de que os sensores de movimento não são à prova de erros e há casos em que pode haver alarmes falsos. Alarmes falsos são mais frequentemente causados por falhas elétricas, erro do usuário, má engenharia de aplicativos, picos de energia, raios e aparelhos com defeito. Eles também podem ser desencadeados por animais, insetos e plantas.
Categorias
- Teste de refluxo
- Sistema de câmera de segurança comercial
- Sistemas de alarme de incêndio
- Extintores de incêndio
- Mangueira de incêndio
- Sistemas de proteção contra incêndio
- Sistemas de aspersão de incêndio
- Sistemas de supressão de incêndio
- Sistema de câmera de segurança doméstica
Detecção de incêndio com processamento de imagem e sensor PIR
![]()
Download grátis pdf visualize pdf
Cartas de reconhecimento de padrões
![]()
Download grátis pdf visualize pdf
Neste artigo, uma estrutura de fusão de Decisão Adaptativa Adaptiva (EADF), baseada em entropia, é desenvolvida para análise de imagem e aplicações de visão computacional. Nesta estrutura, supõe-se que o algoritmo composto consiste em vários sub-algoritmos, cada um dos quais produz sua própria decisão como um número real centrado em torno de zero, representando o nível de confiança desse sub-algoritmo em particular. Os valores de decisão são linearmente combinados com pesos que são atualizados on-line de acordo com um método de fusão ativo baseado na realização de projeções entrópicas em conjuntos convexos que descrevem sub-algoritmos. Supõe -se que exista um oráculo, que geralmente é um operador humano, fornecendo feedback ao método de fusão de decisão. Um sistema de detecção de incêndio selvagem baseado em vídeo é desenvolvido para avaliar o desempenho do algoritmo para lidar com os problemas em que os dados chegam sequencialmente. Nesse caso, o Oracle é o segurança da torre de vigia florestal, verificando a decisão do algoritmo combinado. Resultados da simulação são apresentados. A estrutura EADF também é testada com um conjunto de dados padrão.
![]()
Download grátis pdf visualize pdf
Resumo Neste artigo, uma estrutura de fusão de decisão adaptativa on-line baseada em entropia-funcional (EADF) é desenvolvida para análise de imagem e aplicações de visão computacional. Nesta estrutura, supõe -se que o algoritmo composto consiste em vários subalgoritmos, cada um dos quais produz sua própria decisão como um número real centrado em torno de zero, representando o nível de confiança desse subalgoritmo em particular.
![]()
Download grátis pdf visualize pdf
![]()
Download grátis pdf visualize pdf
![]()
Download grátis pdf visualize pdf
Um aviso precoce é extremamente importante para reduzir a perda de vidas e propriedades do fogo. A região de interesse é capturada usando a câmera CCD e identificada pelo sensor de fumaça no nó do sensor sem fio. As informações de cores de região interessante podem ser obtidas com uma aplicação dos algoritmos de modelo de cores de processamento de imagem digital. A fonte de incêndio é identificada de acordo com as características adquiridas e o nível de fumaça. O sistema é baseado na amostra de imagem contínua. Os resultados experimentais mostram que o sistema pode identificar e confirmar com precisão o incêndio. O nó do sensor de vídeo foi projetado com os sensores como o sensor MQ2 para detecção de fumaça, sensor SHT75 para detecção de temperatura e umidade, sensor OPT101 para detecção de luz e câmera CCD. O alarme é ativado apenas para imagem de incêndio e incidentes de incêndio. Ao combinar a saída do sensor com a saída da imagem, a taxa de alarme falsa é zero e melhora a estabilidade. Detecção e análise de luz são a base para o sistema de detecção de incêndio neste trabalho de processamento de imagem. Neste incêndio, modelos de cores de trabalho como RGB, YMK e HSI são usados para separar a luz laranja, amarela e de alto brilho do fundo em determinadas condições para detectar fogo. A diferença de quadro é usada para analisar e calcular o crescimento e a propagação do fogo. A precisão do sistema é verificada e comparada entre si. A quantidade de processamento de dados pode ser reduzida devido ao uso do algoritmo proposto e, portanto, reduz o tempo e o armazenamento de execução.
![]()
Download grátis pdf visualize pdf
O que são câmeras PIR e como elas funcionam?

Você tem dúvidas sobre a instalação da câmera pir para o seu negócio? Clearway é líder em instalação de CCTV, servindo empresas em todo o Reino Unido. Entre em contato com o Clearway e podemos falar com você através de suas opções.
Fale conosco sobre câmeras PIR!
A detecção PIR (Passive Infra-Red) é uma tecnologia usada em sistemas de segurança para detectar movimentos ou intrusos, reconhecendo a luz emitida de objetos próximos. PIR é o resultado de anos de inovação de produtos, pois as empresas de segurança encontram maneiras novas e inovadoras de detectar a presença de intrusos em instalações comerciais e domésticas.
Ao longo dos anos, sensores e câmeras PIR foram comprovadamente uma das maneiras mais bem -sucedidas de detectar efetivamente intrusos, no entanto, eles’não estou sem suas falhas. Então, o que exatamente é um sensor pir? E o que há neles que os torna tão eficazes?
Conteúdo esconder
Como os sensores pir funcionam?
A radiação é produzida por todos os objetos que têm uma temperatura maior que o zero absoluto. Esta energia é expressa na forma de energia térmica. Como o calor irradia como comprimentos de onda infravermelho, grande parte dessa radiação não é visível para o olho humano, mas pode ser detectado por instrumentos eletrônicos que foram especificamente construídos para esse fim.
Um sensor infravermelho passivo detecta a luz infravermelha emitida por um objeto quente usando tecnologia infravermelha passiva.
No contexto dos sensores PIR em alarmes de ladrões, essa tecnologia é combinada com um relé – um componente de circuito que passa por dois contatos – para acionar um alarme. Quando o sensor pir sente o movimento, ele ativa o relé, que interrompe o circuito e faz com que o alarme seja.
Sensores PIR, em seu nível mais fundamental, trabalham detectando mudanças diferenciais positivas. Dois slots sensíveis ao infravermelho estão localizados em frente à lente, e a faixa de detecção é determinada pelos slots’ Campo de “visão”. Enquanto os dois slots são ‘parado’, A quantidade ambiental de infravermelho sentida na sala (que é naturalmente emitida por todos os itens) é a mesma nos dois slots enquanto eles são ‘ativo’. Quando um objeto, pessoa ou animal se move pela região de detecção, é detectado por um dos slots antes do outro, criando uma mudança diferencial positiva à medida que passa e uma mudança diferencial negativa à medida que sai.
Uma vez que o sensor pir detecte o movimento, um alerta é enviado para o painel de alarme que ativa o alarme. É fundamental envolver completamente o próprio sensor PIR com um material que pode reduzir os efeitos da temperatura e umidade externos, como metais como silício.
Os benefícios do PIR
Sensores de movimento PIR podem ter muitos benefícios em ambientes comerciais e residenciais. As câmeras pir são frequentemente comparadas às câmeras de sensor de movimento, mas PIR tem um forte benefício sobre a detecção de movimento padrão – a redução de alarmes falsos. As câmeras de detecção de movimento não podem distinguir entre o movimento das folhas e um intruso humano, por exemplo, pois simplesmente detectam todos os tipos de movimento. O PIR detecta apenas mudanças de calor, resultando em gatilhos mais confiáveis, gatilhos falsos comuns, como insetos, movimento do vento, folhas, etc’T pegou – economizando tempo e dinheiro no custo de monitoramento.
O principal uso de câmeras PIR em um ambiente comercial ou canteiro de obras é ajudar na proteção de espaços vagos. Embora os alarmes não sejam exatamente uma tecnologia preventiva, eles podem ser usados para desencadear uma resposta, caso os intrusos violem suas medidas iniciais de segurança. A tecnologia PIR pode ser instalada nos seguintes locais estratégicos para detectar visitantes indesejados:
- Portas traseiras, entradas e pontos de acesso
- Lugares cegos ou escondidos perto de paisagismo
- Perto das janelas
- Perímetros do site e estacionamentos
Como você pode reduzir alarmes falsos com PIR (e detectores de movimento padrão)?
Os sensores pir são ótimos em determinar se você tem um intruso ou isso’é apenas um animal, por exemplo. Eles têm um nível de precisão melhor e podem reduzir alarmes falsos em geral. No entanto, você deve prestar atenção a alguns pequenos detalhes para reduzir ainda mais o risco de alarmes falsos de seus sensores de movimento PIR PIR.
Muitos alarmes falsos serão causados pela colocação do alarme e dos sensores, em vez do custo ou qualidade do alarme. Isso significa que, ao instalar alarmes de detector de movimento sem fio, você deve organizá -los em locais que maximizam sua eficiência, minimizando avisos falsos.
Coisas simples como o ar sopra.
Testar a colocação do seu alarme é melhor feita depois que um alarme falso ocorrer. Faltes em equipamentos e interferência de radiofrequência também podem criar alarmes falsos. Primeiro, descarte qualquer um desses problemas. Em caso de dúvida, verifique o posicionamento da câmera. Examine a área ao redor do detector de movimento para ver se está causando alarmes aleatórios.
Câmeras pir em ação

Clearway usa a tecnologia PIR, inclusive em nossa torre CCTV configurada. Nossas câmeras de torre CCTV são uma solução eficaz para monitorar grandes espaços ao ar livre – especialmente em canteiros de obras, grandes áreas vagas e estacionamentos. Como você’Veja no diagrama, nossa torre Inview CCTV pode se conectar até 8 sensores PIR remotos e sem fio, montados até 100m da torre.
Quando um PIR é ativado por um intruso, um desafio de áudio ao vivo pode ser usado na estação de monitoramento para se comunicar com os intrusos. Após a detecção, cada pir instruirá a torre’S câmera para girar, aumentar o zoom e se concentrar na causa da ativação. Nossa torre CCTV é alimentada por uma bateria de backup integral de 24 horas para fornecer ativação contínua, gravação e acesso remoto.
Se você’Estou procurando garantir seus ativos, entre em contato com um de nossos especialistas hoje em 0800 085 8695 e saiba mais sobre nossos recursos de segurança PIR e mais amplos.